Foto dos primeiros testes do sensor de velocidade feito com Arduino que serviu de base para todos os experimentos nestes 6 meses de blog.
Para iniciar 2022, eu vou fazer um pequena retrospectiva. Em dezembro de 2021 este blog completou 6 meses de idade. Ser blogueiro apenas nos tempos livres e manter uma regularidade nos posts não é nada fácil. Mas tem sido uma experiência interessante tentar transportar a ciência dos livros-texto para experimentos que vão além de simples demonstrações, mas que produzam dados reais e que possam despertar o prazer da prática e do pensamento científico em casa, e com materiais relativamente fáceis de encontrar.
Preciso aprender muito mais sobre este tipo de comunicação, e ser mais regular nos posts e vídeos de demonstração. Ainda estou aprendendo sobre ferramentas como newsletter, Google Analytics, divulgação em redes sociais, edição de vídeos, e muitas outras cada vez mais presentes nas nossas vidas e certamente imprescindíveis para o futuro da educação. Mesmo com todas essas limitações considero o saldo positivo, pois entendi que há sim pessoas interessadas neste tipo de conteúdo, inclusive de outros países. Também preciso entender se quem visitou (e possivelmente ainda visita o blog) eram alunos, professores ou apenas curiosos, e aperfeiçoar a linguagem escrita e visual do blog.
Retrospectiva
Ao todo foram 11 posts (incluindo esse), e vários experimentos de mecânica clássica utilizando apenas um sensor de velocidade de baixo custo feito com Arduino. Os assuntos tratados até agora cobrem vários tópicos de um ano letivo quase inteiro de Física (cinemática e dinâmica) do ensino médio:
Medir velocidades de objetos com um sensor feito com Arduino. Usei uma NERF para testar, mas podia ser outra coisa.O sensor é rápido o suficiente para medir pequenos objetos com velocidades da ordem de 60 km/h!
Demonstração do alcance no lançamento oblíquo. Este é um problema de movimento em duas dimensões, que era um terror para muitos alunos no ensino médio.
Explicar a física do loop, tão presente em esportes radicais e entretenimento.
Demonstração experimental da segunda lei de Newton. Além de demonstrar a famosa fórmula $F_R = m a$, este experimento específico tinha um “easter egg” escondido. Um observador mais atento conseguirá encontrar a famosa lei de Hooke das molas elásticas naquele experimento.
Todos experimentos foram feitos com a ajuda do sensor de velocidade do blog que custou cerca de R$ 70,00 (todos os componentes comprados aqui em Fortaleza-CE), sendo o principal custo da placa do Arduino. Mas esta placa pode ajudar a construir uma infinidade de outros experimentos educativos, interessantes e divertidos. O investimento certamente se paga no longo prazo.
Entendo perfeitamente que R$ 70,00 é muito dinheiro para muita gente. Mas infelizmente não existe almoço grátis, e o sub-desenvolvimento científico custa muito mais caro. Os países desenvolvidos investem continuamente em ciência e tecnologia pois suas economias estão cada vez mais dependentes do desenvolvimento e inovação tecnológica.
Tudo bem que usei como elementos motivadores brinquedos que muita gente não tem acesso. Mas era o eu tinha disponível: brinquedos velhos que meu filho não usa mais que, por razões afetivas, eu ainda guardo. Certamente, alguém pode adaptar as ideias descritas nos experimentos para sua própria realidade, e usar seus itens disponíveis.
Escassez de recursos como oportunidade de aprendizado
Adquirir equipamento profissional de laboratório de ensino para demonstrar todos os experimentos que estudamos nestes 6 meses custaria muitos milhares de reais às escolas privadas. E boa parte das escolas públicas brasileiras jamais terão recursos para laboratório de ensino.
Mas a escassez também oferece uma oportunidade de aprender como estes equipamento são pensados, desenvolvidos e construídos em cima dos conceitos teóricos abordados em sala de aula. Abordagens educacionais similares já são adotadas em muitas escolas mundo afora com um nome chique: metodologia STEM (sigla para Science, Technology, Engineering and Math). Estas habilidades são apontadas como essenciais para os empregos do futuro.
Não sei como funciona nas redes estadual e municipal, mas os professores de escolas públicas podem pressionar os gestores para adquirir alguns kits Arduino e desenvolver suas próprias ideias. Não é muito dinheiro para instituições públicas. Iniciativas como esta podem ajudar as escolas a desenvolver seus próprios laboratórios de ensino com seus estudantes, e utilizar a escassez de recursos como experiência educacional permanente que oferece muitas das competências necessárias para o futuro do emprego.
Acreditem! Mesmo eu sendo professor e pesquisador numa das principais universidades do país, passamos muita dificuldade para realizar nossas atividades de pesquisa. O que nos mantém ativos e contribuindo com o desenvolvimento científico é conhecimento fundamental que aprendemos nos livros e criatividade para driblar a falta de recursos. Afinal, este é o real conceito de inovação, fazer mais com menos.
Fico por aqui. Desejo a todos um Feliz 2022 cheio de saúde e conhecimento.
Motivado pelo post da Física do loop, no qual alguns dos carrinhos não foram capazes de completar o loop quando soltos da altura mínima, resolvi comparar o coeficiente de atrito de vários carrinhos Hotwheels repetindo o experimento do post anterior sobre a distância de frenagem.
De forma muito muito resumida, considere um veículo se movendo em uma estradahorizontal com velocidade $v$, e que aciona o freio bruscamente. Este carro irá percorrer uma distância $\Delta x$ antes de parar. Como já sabemos, $F_{at} = \mu N$ é valido para o movimento horizontal, e com a ajuda do teorema do trabalho e energia cinética, é possível determinar coeficiente de atrito. As fórmulas usadas estão mais a frente neste post.
O experimento é muito simples, e pode ser visto no vídeo abaixo. O carrinho é lançado por um lançador de elástico com três níveis de força. Os parâmetros medidos no experimento são apenas dois: (i) a velocidade $v$ do carro é medida pelo sensor de velocidade, e a a distância de parada $\Delta x$ medida em relação à posição do sensor de velocidade.
Vídeo 1: Experimentar para determinar o coeficiente de atrito de carrinhos Hotwheels.
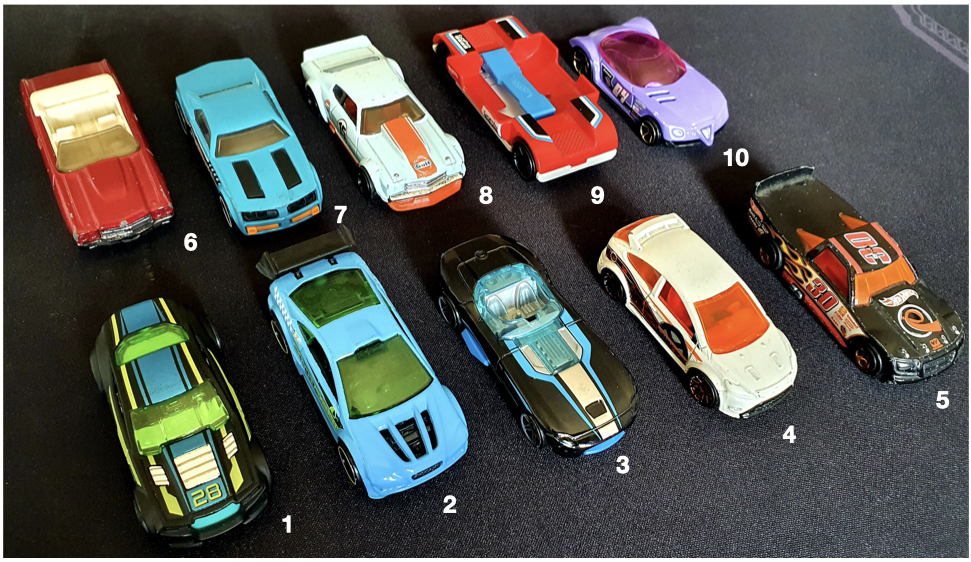
Nós vamos medir o coeficiente de atrito de 10 carrinhos diferentes, mostrados na figura abaixo. Apenas um lançamento foi realizado para cada nível de força do lançador. Para melhorar a precisão dos resultados, seria necessário realizar a média de vários lançamentos (3 a 5 para cada nível de força já seria o suficiente).
Figura 1: Qual o coeficiente de atrito destes 10 carrinhos? Cada carrinho é identificado por um número.
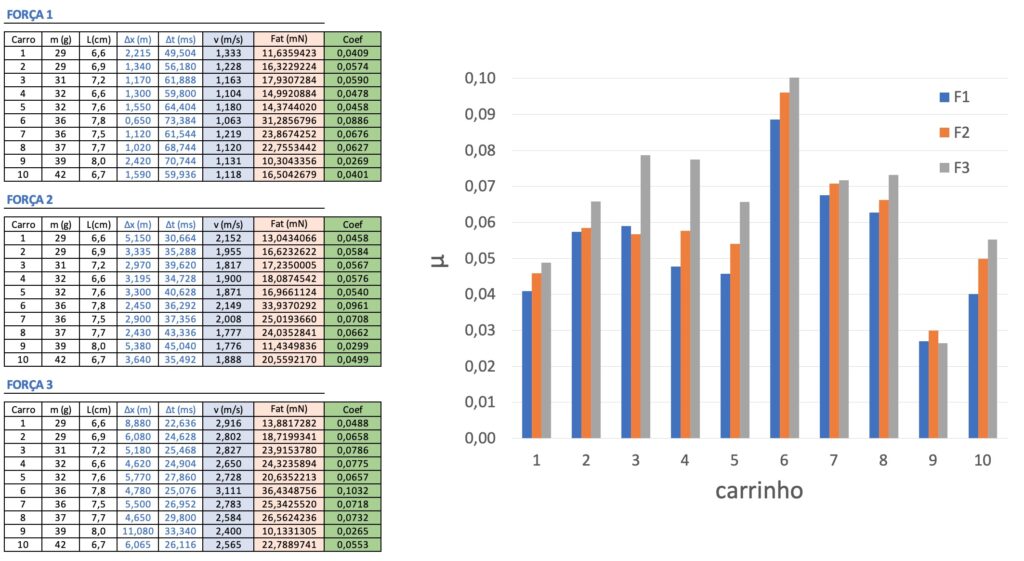
Os dados medidos estão nas tabelas abaixo agrupados por nível de força. As duas primeiras colunas são a massa e o tamanho do carrinho. Em seguida, a distância $\Delta x$ percorrida em cada lançamento, o tempo $\Delta t$ e a velocidade $v$ de passagem pelo sensor, a força de atrito e o coeficiente de atrito com as expressões abaixo:
$$F_{at} = \frac{m v^2}{2 \Delta x},$$
$$\mu = \frac{v^2}{2 g \Delta x}$$,
onde assumimos $g = 9,81~m/s^2$.
Figura 2: (esquerda) Dados dos carros e das medidas feitas em cada lançamento, agrupados por nível de força. (direita) Histograma dos coeficientes de atrito medidos cada cada carro em cada nível de força.
O melhor modo de analisar os resultados é utilizando um tipo de gráfico chamado de histograma. No eixo x, estão as categorias (no nosso caso, cada carro), e o eixo y estão os dados medidos do coeficiente de atrito. Cada cor indica um nível de força.
O primeiro detalhe que chama atenção é que, na maioria dos casos, o coeficiente de atrito depende da força de lançamento de modo que quanto maior a força maior o valor de $\mu$. Mas note também que, na maioria dos casos, os valores de $\mu$ não aumentam muito em relação à força. Por exemplo, para o carro 1, $\mu$ varia de 0,0409 para 0,0488 entre F1 e F3. Note também que $\Delta x$ cresce de 2,215 m para 8,880 m. Ou seja, o carrinho viaja uma distância quase 4 vezes maior. Devido a distância maior, o carrinho também passa por muito mais junções e pista e está sujeito a bater nas laterais da pista quando lançado com F3 em comparação com F1. E estas junções e choques com as bordas certamente afetam a medida do coeficiente de atrito. De qualquer forma, considero as variações pequenas, e estou convencido de que o coeficiente de atrito do carrinho 1 é aproximadamente a média de F1 a F3. No caso do carrinho 1, algo em torno de 0,045.
Uma visão geral mostra que os coeficientes de atrito varia muito entre os modelos. De certa forma, isto explica porque nem todos os carrinhos conseguiram completar o loop quando soltos da mesma altura no post sobre a Física do loop. Se você já brincou ou observou crianças brincando com os carrinhos, certamente sabe que parte da diversão é descobrir quais carrinhos irão completar uma pista construída (veja este vídeo para um exemplo que as crianças adoram).
Com este experimento, tive algumas surpresas interessantes. Sempre usei o carrinho 7 em vários experimentos aqui no blog por achar que ele era mais veloz que o carrinho 1, mas me enganei redondamente. Mas minha maior surpresa foi descobrir que o carrinho 9, feito para levar uma câmera Go Pro Sessions (nem o carrinho e nem a câmera são mais fabricados), é o mais eficiente de todos. Seu coeficiente de atrito é de cerca de 0,025 quando o segundo melhor carrinho (o carro 1) tem praticamente O DOBRO do coeficiente de atrito. Imagino que isto seja feito de propósito, pois o carrinho precisa levar a câmera nas costas para executar percursos e fazer vídeos irados como este aqui.
Para concluir, lembro a vocês que atrito é um assunto que rende bastante material, e ainda estou devendo a conclusão da sequência de posts sobre atrito com um experimento provando que $F_{at}=\mu N$ em pistas inclinadas, e consequentemente, em qualquer situação.
A força de atrito é tratada superficialmente nos livros e problemas de Física, e é praticamente inexistente nas aulas de laboratório. Mas, a menos que você esteja para vácuo do espaço, é praticamente impossível se livrar das forças de atrito.
Na minha época de estudante, a força de atrito me intrigava por uma simples razão. Por que a força de atrito é matematicamente definida como $F_{at} = \mu N$ ($\mu$ é o coeficiente de atrito, e $N$ é a força normal), se ela aponta na direção oposta ao movimento, mas a força $N$ é perpendicular ao movimento? Esta é a pergunta que motivou este post.
O objetivo deste post objetivo é desenvolver um experimento muito simples para estudar a força de atrito e distância de frenagem com Hotwheels, e provar que $F_{at} = \mu N$. Vamos também aprender a determinar o coeficiente de atrito dos carrinhos.
Um pouco de teoria
Imagine um veículo se movendo em uma estrada horizontal com velocidade $v$, e que aciona o freio bruscamente ao ver um obstáculo a uma certa distância a frente na estrada. Qual distância o carro vai percorrer até parar?
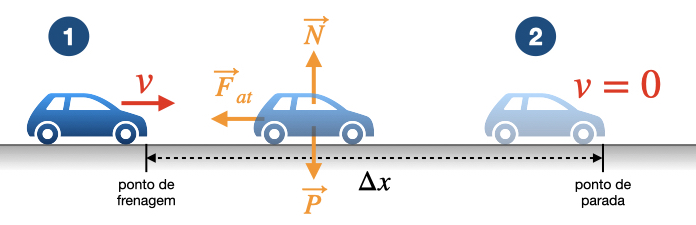
A Figura 1 mostra o diagrama deste problema. No ponto 1, o veículo está com velocidade $v$ e aciona o freio. Sem entrar nos detalhes mais complexos dos mecanismos de freio, durante o período de frenagem o carro está sujeito apenas às forças peso $\vec{P}$, a força normal $\vec{N}$ e a força de atrito $\vec{F}_{at}$.
As forças $\vec{P}$ e $\vec{N}$ atuam na direção vertical e se anulam pois, além de apontarem em direções opostas, não há nenhum movimento nesta direção. Portanto, a força resultante que atua no carro é apenas a força de atrito $\vec{F}_R = \vec{P} + \vec{N} + \vec{F}_{at} = \vec{F}_{at}$.
Figura 1: Diagrama do problema da distância de parada durante um freio.
O teorema trabalho e energia cinética noz diz que o trabalho da força resultante $W_R$ entre os pontos 1 e 2 é igual à variação da energia cinética entre estes pontos:
$$W_R = E_{C,2} – E_{C,1}.$$
Para simplificar a matemática, assumimos que a força de atrito é constante durante toda a distância de frenagem. Desta forma, o trabalho da força resultante $\vec{F}_R$ é calculado como
onde $\Delta \vec{x}$ é o vetor deslocamento (e que aponta na direção do movimento). Esta equação possui uma operação vetorial chamada de produto escalar, mas não se assustem. O significado é mais simples do que parece.
O produto escalar entre dois vetores $\vec{A}$ e $\vec{B}$ é dado por $\vec{A}\cdot\vec{B} = |\vec{A}||\vec{B}|\cos \theta$, onde $|\vec{A}|$ é o módulo do vetor $\vec{A}$, e $\theta$ \e o ângulo entre $\vec{A}$ e $\vec{B}$. Como $\Delta \vec{x}$ e $\vec{F}_{at}$ apontam em direções opostas, o ângulo entre estes vetores é de $180^o$, cujo cosseno é igual a $-1$. Desta forma, o trabalho da força de atrito é negativo:
$$W_{at} = – F_{at} \Delta x$$
O sinal negativo significa que o a força de atrito atua na direção contrária ao movimento. Se esta força atuasse na mesma direção do movimento, o trabalho teria sinal positivo.
Mas no nosso problema específico, a variação de energia cinética também é negativa $E_{C,2}-E_{C,1} = 0 – m v^2/2$. Combinando-se estes dois resultados, encontramos que o módulo da força de atrito durante a frenagem é dado por:
$$F_{at} = \frac{m v^2}{2 \Delta x}.$$
Nós aprendemos na escola que $F_{at} = \mu N$, onde $\mu$ é o coeficiente de atrito. Como nosso problema ocorre inteiramente na horizontal, temos que $N=P = m g$ ($g$ é a aceleração da gravidade). Daí, temos que:
$$F_{at} = \mu m g$$.
Observando cuidadosamente as duas equações acima, é possível propor uma forma simples de provar que a força de atrito é, de fato, proporcional à força normal (ao menos no problema do movimento completamente horizontal !).
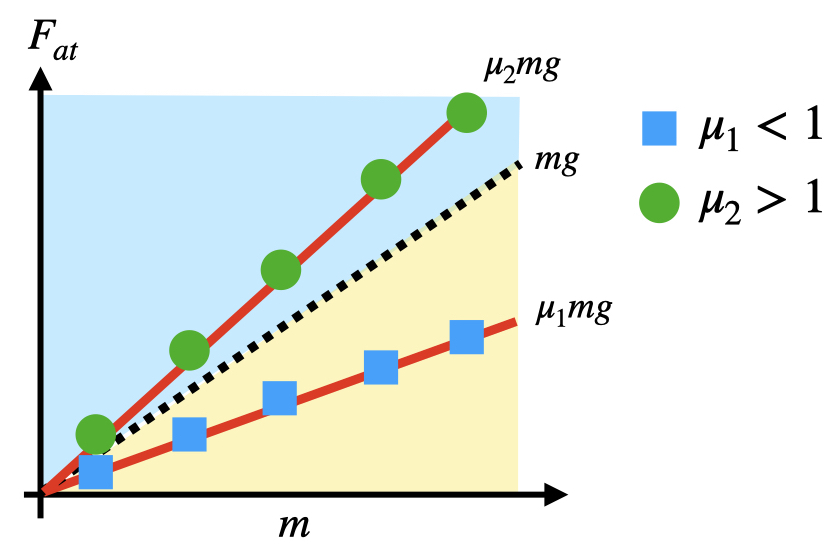
Se usarmos um carrinho que pode carregar pequenos pesos (usei o mesmo do post sobre a 2a. lei de Newton), e assim variar sua massa, podemos realizar o experimento de distância de parada para massas diferentes e plotar o gráfico $F_{at} \times m$. Devemos então obter os resultados experimentais recaindo sobre uma linha reta como mostrado na Figura 2.
Figura 2: Gráfico esperado do comportamento da força de atrito em função da massa o problema da distância de parada do movimento horizontal.
Na Figura 2, a linha tracejada representa a força peso $P$. Se os dados de de $F_{at} \times m$ recaírem sobre uma linha reta, temos que $F_{at} \propto N$ pois $P = N$ no movimento horizontal. Neste caso, o coeficiente da reta dever ser $\mu g$ pois $F_{at} = \mu m g$. Além disso, se os dados experimentais recaírem abaixo da linha da força $P$, o coeficiente de atrito do carrinho é menor que 1. Se os dados recaírem sobre uma linha acima da linha de $P$, é porque o coeficiente de atrito do carrinho é maior que 1. Chamo aqui a atenção para um fato muito importante: o coeficiente de atrito é uma grandeza adimensional !!!
O Experimento
De acordo com nosso modelo teórico descrito, precisamos lançar o carrinho com uma velocidade $v$, e medir a distância $\Delta x$ entre o ponto que a velocidade foi medida, e o ponto em que o carrinho parou. Estes dois valores são então substituídos nas equações acima para determinar a força de atrito. O setup experimental usado é mostrado na Figura 3.
Figura 3: Setup experimental.
Utilizei um único sensor de velocidade posicionado a uma pequena distância do ponto de lançamento do carrinho. Após o lançamento, a velocidade do carrinho é medida pelo sensor, e ele então percorre uma distância $\Delta x$ até parar. Utilizei o lançador e carrinho que pode levar várias moedas de 1 R$ do post anterior como forma de ter controle sobre a massa de um único carrinho, afim de evitar variações de coeficientes de atrito entre carrinhos diferentes. Este lançador possui 3 níveis de força e é capaz de aplicar forças resultantes da ordem de 0,8 mN, 1,6 mN e 2,8 mN, respectivamente. É importante lembrar que $\Delta x$ precisa ser medido entre o sensor e a traseira do carrinho.
Para minha surpresa, o carrinho com 7 moedas (cerca de 95 gramas) lançado no nível 2 de força percorre cerca 3,7 m antes parar. Isso mostra como o coeficiente de atrito dos carrinhos Hotwheels é baixo! Para o carrinho mais leve (cerca de 45 g), precisei de 11m de pista. Impressionante !!! Veja abaixo um exemplo de lançamento.
Vídeo: Lançamento do carrinho com 94g com o lançador no nível intermediário de força. A distância de parada foi de aproximadamente 3,7m. A velocidade do carrinho pelo sensor for de 1,19 m/s
Para termos ideia do coeficiente de atrito, podemos usar como exemplo os dados de lançamento do vídeo acima. O carrinho com 94g passou pelo sensor com 1,19 m/s, e percorreu 3,7 m antes de parar. Se o modelo teórico estiver correto, o coeficiente de atrito é dado por $\mu = v^2/(2 g \Delta x) \approx 0,019$. De fato, é um valor muito pequeno. Mas lembre-se que a estimativa acima ainda não prova que $F_{at} \propto N$!
Dados experimentais
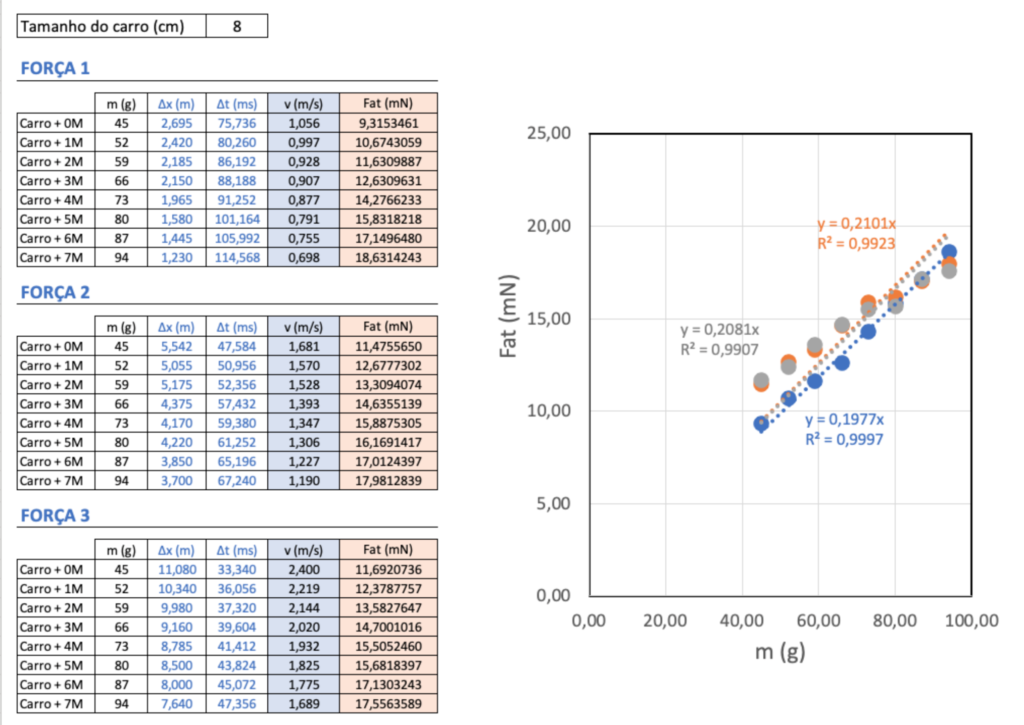
A Figura 4 mostra os dados medidos de força de atrito em função da massa do carrinho medida individualmente para cada nível de força do lançador. A massa do carrinho varia entre 45 g (sem nenhuma moeda) e 94 g (levando 7 moedas), em incrementos de 7 g (equivalente ao peso de uma moeda de 1 R$). As forças de atrito variaram entre 9 mN e 20 mN, confirmando que o atrito sobre os carrinhos é muito pequeno. Um detalhe importante, dada a grande quantidade de dados, é que fiz apenas um lançamento para cada combinação de massa e nível de força para simplificar a análise.
Figura 4: Dados experimentais
As medidas mostram que $F_{at}$ cresce linearmente em relação a massa, confirmando que $F_{at} \propto N$ no movimento horizontal. Além disso, os coeficientes lineares obtidos para cada nível de força do lançador são bastante parecidos: 0.1977 (nível 1), 0,2101 (nível 2) e 0,2081 (nível 3). Lembrando-se que, de acordo com a teoria $F_{at} = \mu m g$, o coeficiente linear da reta que descreve $F_{at} \times m$ é dados por $\mu g$. Precisamos ainda dividir os coeficientes das retas por $g = 9,81 m/s^2$ para obter os valores de $mu$.
Os valores obtidos de $\mu$ são: 0,020 (nível 1), 0,021 (nivel 2) e 0,021 (nível 3). Ou seja, os coeficientes de atrito obtidos para cada nível de força são idênticos. Mas isso é natural, já que usamos o mesmo carrinho, e o atrito deve ser o mesmo, independente do nível de força do lançamento.
Há uma pequena discrepância entre os dados do lançamento do nível 1, em relação aos níveis 2 e 3, quando o carrinho está mais leve, mas esta diferença é muito pequena. Uma razão possível para esta discrepância é que o carrinho mais leve lançado nos níveis de força 2 e 3 percorre muitos metros a mais pista comparado com o carrinho mais pesado e/ou lançado no nível 1. Quanto maior a força do lançamento, maior a distância percorrida pelo carrinho, e maiores são as chances do carrinho tocar nas laterais da pista, aumentando assim o coeficiente de atrito efetivo. Um outro detalhe que certamente faz diferença é que quanto maior o $\Delta x$, maior é o número de junções de pista que o carrinho vai atravessar. E estas junções não são perfeitamente alinhadas. Isto também ajuda a desacelerar o carrinho um pouco mais rápido. Veja no vídeo 2 o carrinho sofrendo pequenas variações de trajetória ao passar pelas junções e ao bater nas laterais da pista.
Nos meus testes, percebi variações de até 50 cm na distância de frenagem para lançamentos realizados com a mesma massa no nível 3 de força. Fazer a média de vários lançamentos para cada combinação de força de lançamento e massa, deve eliminar estas discrepâncias. Fixar a pista no chão com fita adesiva também ajuda a prevenir vibrações que podem aumentar a chance contato do carro com as bordas da pista.
Vídeo 2: Pequenas variações de trajetória devido às junções e bordas laterais da pista.
Conclusões
O experimento descrito neste post nos permitiu demonstrar que $F_{at} = \mu N$ no movimento horizontal. Para isso, partimos apenas de um único principio fundamental: o teorema trabalho – energia cinética. Além disso, assumimos que a força de atrito era constante durante toda a distância de frenagem, e não levamos em conta o movimento de rotação dos pneus dos carrinhos, mas nada disso invalida qualitativa e quantitativamente os resultados obtidos aqui.
Para melhorar a precisão dos experimentos, convido os leitores a reproduzir o experimento realizando vários lançamentos para cada massa e nível de força, e construir os gráficos com os valores médios.
Um outro detalhe importante: para facilitar a coleta dos dados, usei um pequena tela OLED para projetar os valores dos tempos de passagem sem precisar monitorar as medidas pelo computador. Desta forma, o sensor de velocidade torna-se completamente independente do computador, e funciona como uma unidade portátil de realização de experimentos. Decidi não mostrar como se faz isto neste post, pois ele já está longo demais, mas prometo escrever um post sobre como fazer isso.
Finalmente, e não menos importante, o nosso experimento apenas prova que $F_{at} = \mu N$ é valida no movimento horizontal. A prova desta equação para movimento em pistas inclinadas, e portanto, em qualquer situação será assunto para o próximo experimento.
Depois de várias semanas sem conseguir publicar nada, vamos voltar em grande estilo. No post de hoje vamos demonstrar como provar a 2a. lei de Newton utilizando apenas um sensor de velocidade, moedas, carrinhos a acessórios Hotwheels. Mas antes, vamos rever rapidamente a teoria.
O básico da 2a. lei de Newton
A segunda lei de Newton diz que um corpo de massa $m$ sujeito a uma força resultante $\vec{F}_R$ se move com aceleração $\vec{a}$ definida por:
$$\vec{F}_R = m \vec{a}.$$
A força $\vec{F}_R$ e a aceleração $\vec{a}$ são grandezas vetoriais e apontam sempre na mesma direção. A expressão acima é bem geral e vale tanto para movimento em linha reta ou curvilíneo. Um detalhe importante é que $\vec{F}_R$ é a força resultante, ou seja, é a combinação (soma vetorial) de todas as forças atuando no corpo de massa $m$ que produz a aceleração $\vec{a}$. Além disso, a expressãoo acima permanece válida mesmo que a força e a aceleração variem no tempo, mas a massa deve ser uma constante. Para os casos em que a massa é variável (ex.: lançamento de um foguete), a 2a. lei de Newton é escrita da seguinte forma:
$$\vec{F}_R = m \frac{d \vec{p}}{d t} = m \vec{a} + \frac{d m}{ dt} \vec{v},$$
onde $\vec{p}= m \vec{v}$ é o momento linear do corpo, e $d m/d t$ é taxa de variação da massa do corpo. Mas neste post, nós vamos nos estudar apenas o caso em que a massa permanece constante.
A aceleração é a quantidade física que descreve quão rápido a velocidade de um corpo muda, e é definida como:
onde $\vec{v}_i$ e $\vec{v}_f$ representam as velocidades inicial e final, respectivamente, e $\Delta t$ é um intervalo de tempo.
Olhando para as equações acima, precisamos ser capazes de medir aceleração, força, e massa para demonstrar a 2a. lei de Newton. Medir massa é simples, podemos utilizar uma balança de cozinha dessas bem baratinhas. Porém, medir forças é mais complicado pois precisamos de sensores específicos que não disponho no momento. Já a aceleração pode ser medida com acelerômetros (também mais complicados e que merecerem um post só para falar deles), ou com sensores de velocidade destes que uso aqui no blog.
No caso mais geral, precisamos de dois sensores para medir as velocidades $\vec{v}_i$ e $\vec{v}_f$, e também medir o tempo $\Delta t$ que o objeto leva para ir de um sensor ao outro. Embora não seja nada exorbitante complicado usar dois sensores com Arduino, a ideia deste post é bolar um experimento para provar a 2a. lei de Newton com um único sensor de velocidade e sem nenhum sensor de força.
Desenhando o experimento
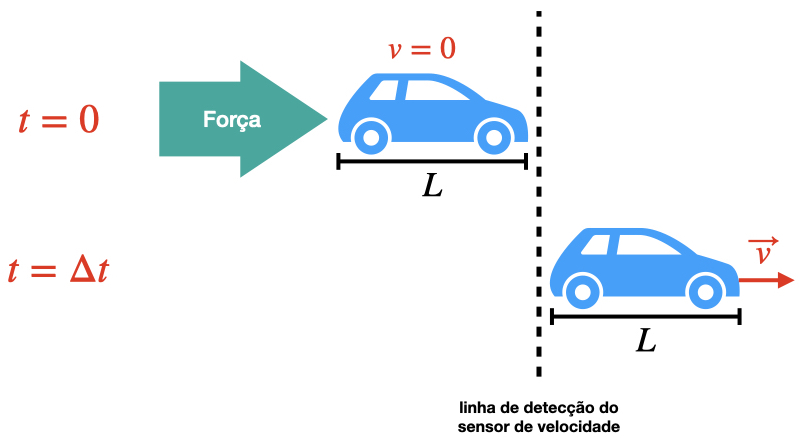
Imagine a situação mostrada na Figura 1. Você coloca um corpo de massa $m$ e comprimento $L$ parado imediatamente atrás da linha de ação do sensor de velocidade. No instante $t=0$ um dispositivo qualquer aplica subitamente uma força desconhecida $F$ sobre o corpo, e ele começa a se mover ativando o sensor de velocidade. Em um instante posterior $t = \Delta t$ o corpo cruza inteiro a linha de detecção do sensor. Neste instante o corpo está com uma velocidade $v$. Desta forma sabemos as velocidades do corpo exatamente antes ($v_i=0$), e exatamente depois do corpo cruzar o sensor de velocidade $v_f=v$, e o tempo $\Delta t$ em que houve variação de velocidade.
Figura 1: Estratégia para medir a aceleração de um corpo usando apenas um sensor de velocidade. Para determinar a aceleração com o esquema acima usando apenas um sensor de velocidade, é necessário que a velocidade inicial seja nula.
Assumindo que somente a força $F$ atuou sobre o corpo, podemos então aplicar a 2a. lei de Newton (em uma dimensão) e determinar o valor de $F$:
$$F = m a = m \frac{\Delta v}{\Delta t} = m \frac{v-0}{\Delta t}=\frac{m v}{\Delta t}.$$
Ora, mas $v$ é a velocidade instantânea do carro ao passar pelo sensor e pode ser determinada como:
$$v=\frac{L}{\Delta t}.$$
Daí, o valor desconhecimento de $F$ pode ser determinado como:
$$F = \frac{m L}{\Delta t^2}.$$
Os parâmetros $m$, $L$ e $\Delta t$ são facilmente determinados com uma balança de cozinha, uma fita métrica e com o nosso sensor de velocidade feito com Arduino.
O experimento
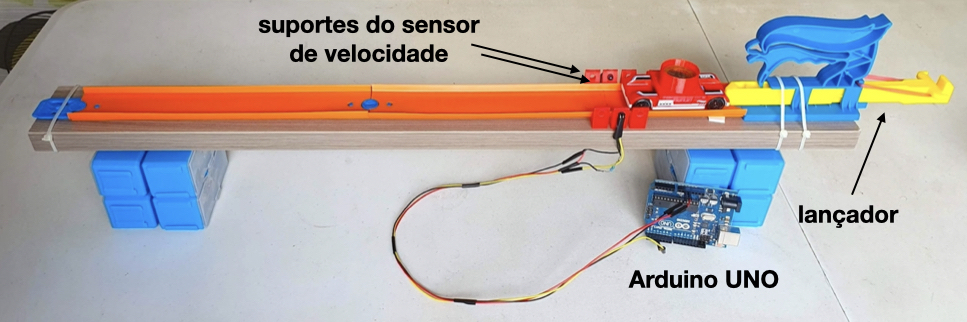
Mais uma vez vamos utilizar carrinhos e acessórios Hotwheels para construir nosso experimento, e provar a 2a. lei de Newton. A Figura 2 mostra o arranjo experimental com 2 segmentos de pista, um lançador de carrinhos de elástico com 3 níveis de força, um suporte para o sensor e o sensor de velocidade. Nos meus testes, percebi que o lançador e a pista precisam ficar bem fixos e se mexer o mínimo possível em cada lançamento. Por isso prendi tudo com braçadeiras plásticas.
Figura 2: Experimento montado.
Percebi também alguns problemas com este arranjo experimental:
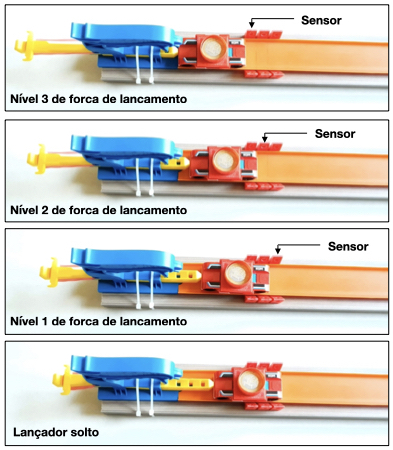
PROBLEMA 1: Pelo tipo de lançador baseado em elásticos, a cada nível de força o elástico estica mais, e o carrinho é lançado de um ponto mais atrás, conforme mostra a Figura 3. O ideal é que o carrinho comece o movimento a uma distância fixa do sensor, independente do nível de força do lançamento.
Figura 3: Para reproduzir a situação mostrada na Figura 1, o sensor de velocidade deve ser reposicionado cada vez que mudarmos o nível da força do lançamento.
PROBLEMA 2: Ajusta o sensor, medir o tamanho do carro, a massa dele, o tempo $\Delta t$ de cada lançamento, e substituir na fórmula vai sim fornece um número com unidades de força, mas não é uma prova da lei de Newton. Para provar que $F=m a$ é válida, seria necessário confirmar que a força $F$ exercida pelo lançador sobre o carrinho é numericamente igual a $m L/\Delta t^2$. Mas não temos um sensor de força ainda!
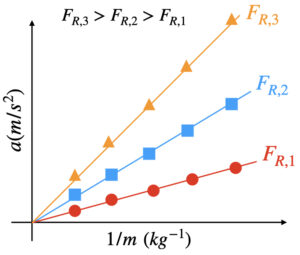
Somos pessoas criativas e podemos driblar o a falta de um sensor de força com conhecimento. A 2a. lei diz que $F_R = m a$, mas só temos os meios de medir $m$, $L$ e $\Delta t$, e uma lançador com 3 níveis de força desconhecidos. Mas se a 2a. lei estiver correta, podemos realizar vários lançamentos mantendo fixo o nível de força em carrinhos com diferentes massas $m$, e medir a respectiva aceleração de cada carrinho. Como $a = F_R/m$, se plotarmos $a~versus~m^{-1}$, o gráfico dever ser uma reta cujo coeficiente linear é o valor da força. Como os níveis de força do lançador são tais que $F_{R,3}>F_{R,2}>F_{R,1}$, o gráfico dos lançamentos com carrinhos de diferentes massas deve se parecer com a Figura 4.
Figura 4: Forma esperada do gráfico de $a~vs~(1/m)$ para diferentes intensidades de força resultante.
Se o gráfico medido for uma reta, então a 2a. lei está provada. E de quebra podemos ainda conhecer a intensidade de cada nível de força do lançador.
PROBLEMA 3: Nosso experimento vai determinar a força resultante, ou seja, a combinação de todas as forças atuando sobre o carrinho, incluindo o atrito. Já sabemos que nenhum carrinho é igual ao outro e possuem níveis de atrito diferentes. Para manter sobre controle o atrito, vamos utilizar um carrinho especial modificado, mostrado na Figura 5. Este carrinho foi fabricado para levar a câmera Gopro Sessions (já descontinuada) e fazer vídeos radicais. Para ver este carrinho em ação clique aqui.
Achei esse carrinho numa loja de brinquedo por menos de R$ 10,00. Mas em vez da câmera, adaptei um suporte para moedas de 1 Real, e fiz a massa variar aumentando o número de moedas. Cada moeda possui 7g de massa, e para cada curva fiz 8 medidas, variando o peso do carrinho de 0 até 7 moedas. Especificamente, a massa varia de 45 g até 94 g em passos de 7g. Uma curva com 8 pontos é suficiente para mostrar uma bela linha reta se ela existir.
Figura 5: Carrinho com e sem suporte para receber moedas de 1 Real. Este carrinho possui L = 8 cm de comprimento.
As medidas
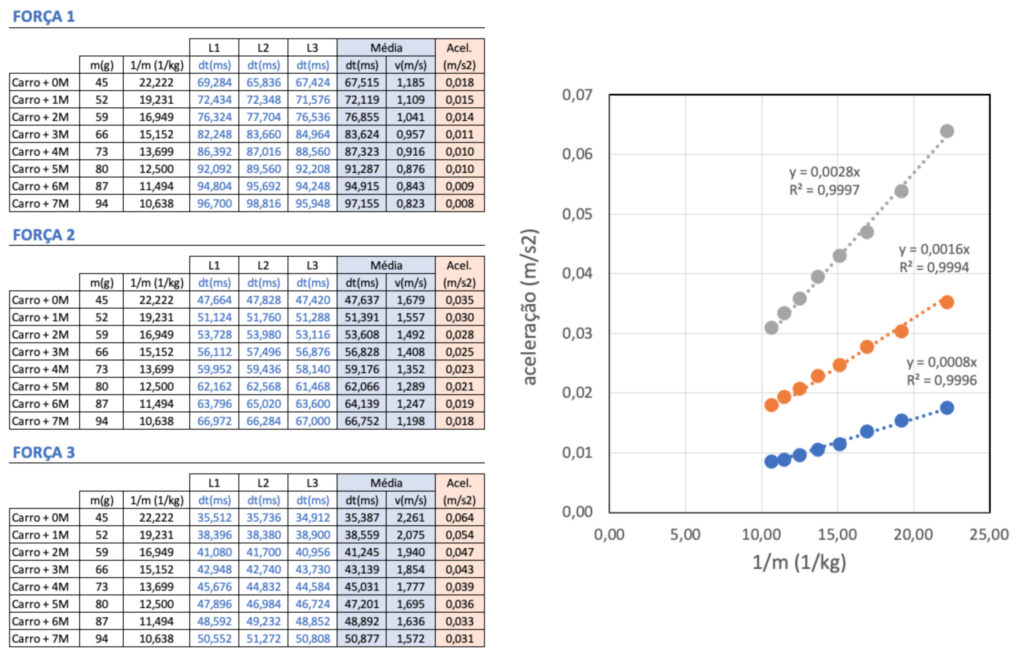
Para melhorar ainda mais a precisão, decidi fazer 3 lançamentos para cada massa e nível força, tirar a média aritmética dos tempos de passagem $\Delta t$, e com ele calcular a velocidade e aceleração. Todos os dados medidos estão na Figura 6. É fácil perceber que as os dados medidos formam linhas retas quase perfeitas. Os dados em azul representam os lançamentos com nível de força 1, os dados laranja representam os lançamento com nível de força 2, e os dados cinza representam os lançamentos com o nível de força 3.
De acordo com a nossa teoria, o coeficiente linear das curvas representa a força resultante de cada nível de força. Em particular, obtive $F_{R,1} = 0,0008~N$, $F_{R,2} = 0,0016~N$, e $F_{R,1} = 0,0028~N$. Conforme esperado, estes valorem obedecem $F_{R,3} > F_{R,2} > F_{R,1}$.
Finalmente, podemos concluir que este experimento muito simples que utiliza somente um sensor de velocidade reproduziu muito bem o comportamento previsto pela 2a. lei de Newton. Confesso que fiquei surpreso com a qualidade dos resultados, mesmo com a limitação auto-imposta de usar apenas um sensor.
Medidas mais precisas da aceleração podem ser obtidas combinando-se 2 sensores de velocidade. Mas isto é assunto para posts futuros.
Figura 6: Dados experimentais. As curvas para cada nível de força foi construída com 8 pontos que apresentam as massas variando de 45 g até 94 g em passos de 7g. Cada ponto representa a média aritmética de 3 lançamentos. As intensidades estimadas das forças são $F_{R,1} = 0,0008~N$, $F_{R,2} = 0,0016~N$, e $F_{R,1} = 0,0028~N$. A planilha Excel cos dados medidos pode ser baixada aqui.
Veja a demonstração em vídeo aqui (modificado em 08/11/2021):
Looping é uma manobra bastante comum em esportes radicais e no entretenimento como no skate, em espetáculos de circo e até em videogames, como mostrado na Figura 1. Neste post, nós vamos discutir quais a condições necessárias para que o loop seja executado com segurança.
Figura 1: loop presente em manobras de skate, no globo da morte e no videogame.
A Física do loop
A Figura 2 mostra um sistema idealizado para estudarmos o looping. Para simplificar, assumimos que o loop é um círculo de raio $R$. Um corpo em repouso é liberado do ponto 1, localizado a uma altura H em relação ao solo, e desce até o nível do solo onde atinge uma velocidade $v_0$ momentos antes de entrar no loop. Nosso objetivo e determina a velocidade $v_0$ mínima para que possamos executar o looping sem cair.
No ponto mais alto do loop, o corpo tem uma velocidade $v_1$, e sai do loop com uma velocidade $v_2$. Assumimos também que o corpo não tem nenhum tipo de propulsão, e toda a velocidade de entrada no loop foi causada apenas pela elevação inicial do ponto 1.
Figura 2: sistema idealizado para estudar a Física do looping.
Vamos nos concentrar inicialmente entre os pontos 2 e 3. No ponto 2, o corpo possui apenas energia cinética, enquanto no ponto 3 possui energia cinética e energia potencial gravitacional. Assumindo que a energia mecânica total é conservada entre os pontos 2 e 3 ($E_{M,2}=E_{M,3}$), temos:
$$E_{M,2} = \frac{m v_0^2}{2}$$
$$E_{M,3} = \frac{m v_1^2}{2}+m g(2 R)$$
$$v_0^2 = v_1^2+ 4 R g.$$
Nas expressões acima, $m$ é a massa do corpo e $g$ é aceleração da gravidade. A última equação mostra que $v_0$ depende de $v_1$ e que, sozinha, esta equação não permite dizer nadinha sobre qual o valor de $v_0$ que permita executar o looping.
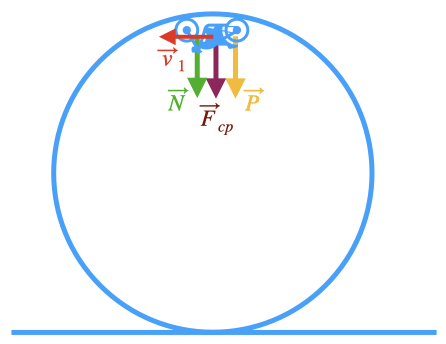
A condição necessária para que o o corpo execute o looping é NÃO PERDER CONTATO COM PISTA ! Enquanto houver contato, o corpo faz uma força sobre a pista que, pela 3a. lei de Newton, aplica uma força mesmo módulo mas na direção contrária no corpo. Esta forçado reação da pista sobre o corpo é a força normal $\vec{N}$. Desprezando-se qualquer tipo de atrito, a outra força atuando sobre o corpo é o seu peso $\vec{P}$. O diagrama de forças que atua no corpo no ponto mais alto do loop é mostrado na Figura 3.
Figura 3: Diagrama de forças atuando no corpo no ponto mais alto do loop.
Devido ao movimento encurvado, o corpo está sujeito a uma força centrípeta resultante igual a soma vetorial de todas as forças atuando no corpo, ou seja, $\vec{F}_{cp}=\vec{N}+\vec{P}$. Como todos os vetores são colineares no ponto mais alto, tem-se portanto $F_{cp} = N+P$. A condição para que haja contato do corpo com a pista é que o módulo da força normal seja diferente de zero, ou seja, $N = F_{cp}-P>0$. Como $F_{cp} = m v_1^2/R$, a condição para que o corpo não perca contato com o loop é:
$$v_1^2 > R g.$$
Desta forma, a velocidade mínima de entrada para realizar o looping sem cair é:
$$v_0^2 > 5 R g.$$
Para concluir falta apenas determinar qual a altura mínima que devemos soltar o corpo na rampa para que ele complete loop. Para isso, assumimos mais uma vez que a energia mecânica total é conservada entre os pontos 1 e 2 $E_{M,1}=E_{M,2}$:
$$E_{M,1} = m g H$$
$$E_{M,2} = \frac{m v_0^2}{2}$$
$$v_0^2 = 2 g H.$$
Finalmente, a altura $H$ que o carro deve ser solto para completar o loop é:
$$H > 2,5 R.$$
E se houver atrito?
Na descrição acima, assumimos que a energia mecânica total se conserva em todo o trajeto do ponto 1 até o ponto 3. Contudo, vimos no post anterior que se houver qualquer tipo de atrito, um corpo solto de uma altura $H$ na rampa, ele vai chegar no ponto 2 com uma velocidade tal que $v_0^2 < 2 g H$. Portanto, para executar o loop basta soltar o corpo de uma altura um pouco maior para compensar a dissipação da energia mecânica pelo atrito.
Uma forma simples de quantificar este efeito é o seguinte. Imagine que a entre os pontos 1 e 2 hove uma perda e 5% de energia, e mais outros 5% entre os pontos 2 e 3. Portanto, temos que $E_{M,2} = 0,95 E_{M,1}$, e $E_{M,3} = 0,95 E_{M,2}$. Mesmo com atrito na pista, a condição para que o corpo não perca contato com a pista continua sendo $v_1^2 > R g$. Deixo como exercícios para os leitores, demonstrar que a nova altura para soltar o corpo e realizar o loop deve ser tal que $H > (2,5 R)/(0,95)^2$, ou mais precisamente $H > 2,77 R$. Ou seja, precisamos aumentar a altura em cerca de 10% para que o corpo consiga realizar o loop.
Finalmente o experimento
A Figura 4 mostra o experimento realizado para testar nossa teoria. O loop utilizado não é perfeitamente circular, e possui cerca de 24 cm de diâmetro. Portanto, a altura mínima para o carrinho conseguir fazer o looping sem cair é de aproximadamente 30 cm. Se assumirmos uma dissipação de energia mecânica de 5% entre os pontos 1 e 2, e outros 5% entre 2 e 3, a altura mínima será de 33 cm. Em termos de velocidade, a condição mínima para que os carrinhos realizassem o loop é que $v_0 > \sqrt{5 R g}$. Assumindo $g = 9,81~m/s^2$ e $R = 0,12~m$, a velocidade mínima para completar o loop é de aproximadamente $2,43~m/s$ ($8,7~km/h$).
Figura 4: Experimento para demonstrar a Física do looping utilizando uma pista Hotwheels. Testei 5 carrinhos. Os carrinhos 1, 2 3 têm os pneus bem balanceados. Oscarrinhos 4 e 5 estão desbalanceados e não conseguem andar em linha reta por muito tempo.
Neste experimento, utilizei 5 carrinhos Hotwheels diferentes, sendo que dois deles já estavam velhinhos e apresentavam desbalanceamento nos pneus e não conseguiam andar em linha reta muito tempo (carrinhos 4 e 5). Os carrinhos desbalanceados tendem a encostar nas bordas da pista, e atendem bem ao nosso intuito de testar o efeito do atrito.
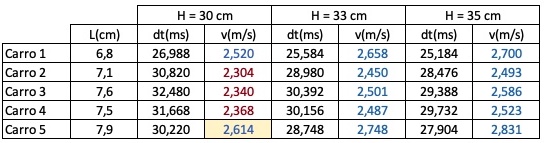
A tabela 1 mostra as velocidades medidas na entrada do loop para todos os carrinhos soltos em diferentes alturas: 30 cm (prevista pela teoria como a altura mínima necessária para o carrinho percorrer o loop sem cair), 33 cm e 35 cm (para testar a hipótese de dissipação de energia mecânica por atrito). As velocidades foram medidas utilizando o sensor de velocidade discutido no post Conservação da energia mecânica com Hotwheels e Arduino.
Quando soltos de uma altura ligeiramente acima de 30 cm, somente o carrinho 1 conseguiu completar o loop sem cair. A velocidade $v_0$ medida for de 2,52 m/s, um pouco acima do limiar teórico de 2,43 m/s. Nenhum dos outro carrinhos conseguiu percorrer o loop quando soltos de 30 cm. Neste grupo, os carrinhnos 2,3 e 4 apresentaram a velocidade de entrada no loop abaixo da velocidade limite e, portanto, não tinham energia suficiente para percorrer o loop sem cair. Contudo, o carrinho 5, apesar de ter caído, apresentou velocidade de entrada de 2,614 m/s, acima da velocidade mínima. É óbvio que este carrinho dissipa mais energia na subida do loop que os outros, pois ele é dos carrinhos que claramente apresentava um desbalançeamento das rodas.
Quando os carrinhos foram soltos de uma altura de 33 cm (10% acima da altura mínima prevista pela teoria), todos completaram o loop, sendo que alguns deles visivelmente completaram o loop com velocidade de entrada ligeiramente acima da velocidade limiar. Por exemplo, o carrinho 2 apresentou velocidade de entrada de 2,45 m/s, apenas 0,02 m/s acima da velocidade mínima. O mesmo foi observado nos carrinhos 3 e 4. Finalmente, quando soltos de uma altura de 35 cm, todos os carrinhos percorreram o loop confortavelmente sem cair, todos com velocidades de entrada acima da velocidade mínima.
Tabela 1: velocidades de entrada no loop dos carrinhos soltos a partir de alturas diferentes. As velocidade em azul (vermelho) estão acima (abaixo) da velocidade mínima teórica de 2,43 m/s necessária para percorrer o loop sem cair. Obs: Para o lançamento de 30 cm, o carrinho 5 apresentou velocidade de entrada acima de 2,43 m/s, mas caiu do loop. O carrinho 5 parece dissipar mais energia mecânica que os outros carrinhos na subida do loop.
Em conclusão, nosso experimento demonstrou que as condições necessárias para percorrer o loop sem cair, ou seja, uma velocidade de entrada $v_0>\sqrt{5 R g}$ garante que o carrinho passe pelo ponto mais alto do loop sem perder contato com a pista. foram comprovadas experimentalmente, apesar da pequena dissipação de energia mecânica por atrito. Para garantir esta velocidade de entrada, basta soltar o carrinho de uma altura $H> 2,5 R$. O nosso melhor carrinho (o carrinho 1) satisfez perfeitamente as previsões teóricas, enquanto os ouros carrinhos precisaram de uma elevação inicial até 10% maior para ganhar velocidade suficiente para percorrer o loop sem cair.
Preciso fazer três observações importantes: (i) o loop é flexível e pode balançar durante a passagem, e fazer com que o carrinho caia da pista. O ideal é colocar um suporte para minimizar o balanço da pista e usar fita adesiva para fixar o loop na mesa. Mesmo assim ele vai balançar. (ii) O sensor de velocidade precisa ser fixado na pista sem balançar. O movimento do sensor durante a passagem do carrinho pode afetar as medidas de velocidade. (iii) As medidas da altura foram feitas com fita métrica simples, e portanto sujeitas a pequenas variações tanto na medida da altura quanto no ponto em que o carrinho foi solto. Estas duas fontes de imprecisão fazem com que haja pequenas variações de velocidade em cada lançamento até mesmo quando usamos o mesmo carrinho. O ideal é fazer uma média de 3 ou 4 lançamentos para cada carrinho e fazer uma média aritmética simples. Mas não se preocupem, flutuações existem até mesmo em laboratórios de alta tecnologia, mas o importante é que elas não sejam grandes o suficiente para apontar um resultado que seja incompatível com o modelo utilizado para explicar o experimento.
Assista aqui a demonstração em vídeo deste experimento:
O nosso sensor de passagem para medir velocidade continua rendendo várias experiências interessantes e divertidas. No posto de hoje vamos falar sobre conservação de energia mecânica utilizando novamente uma pista de carrinhos Hotwheels e um sensor de velocidade.
Tipos de energia mecânica
Energia mecânica é todo tipo de energia associada ao movimento e/ou posição dos corpos. Na escola a gente aprende que há dois tipos de energia mecânica:
Energia cinética: um tipo de energia que está associada ao movimento dos corpos. Se um corpo de massa $m$ se move com velocidade $v$, este corpor possui uma energia cinética $E_C$ dada por:
$$E_C = \frac{m v^2}{2}$$
Energia potencial: um tipo de energia que está associado a posição de um objeto em relação a algum tipo de campo de força que interaja com o objeto. Na escola, a gente aprende que há 3 tipos de energia potencial: energia potencial gravitacional, energia potencial elástica, e energia potencial elétrica. Em outras oportunidades iremos discutir mais especificamente as diferentes formas de energia potencial, mas neste post iremos focar apenas na energia potencial gravitacional. Sabemos que qualquer objeto ou ser vivo em nosso planeta está sujeito ao campo gravitacional da Terra. Se elevarmos e soltarmos um objeto de massa $m$ a uma altura $H$ do solo, sabe-se que este objeto vai cair. E quanto mais alta for a altura $H$, maior vai ser a velocidade com que o objeto atinge o solo. Antes de o objeto adquirir energia cinética devido ao movimento de queda, o objeto ganhou energia potencial gravitacional dada por:
$$U_g = m g H$$
Conservação da energia mecânica
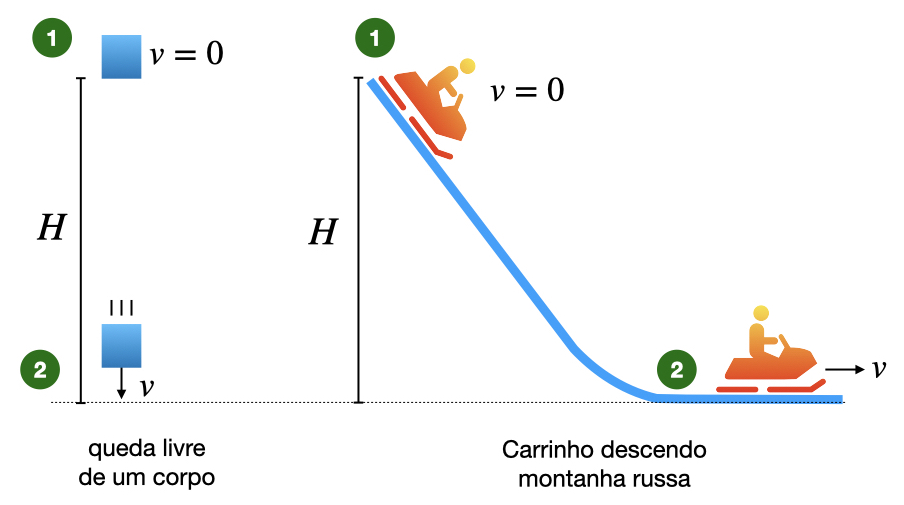
Um princípios mais importantes que regem tudo o que existe no universo é o da conservação da energia, seja ela mecânica ou não-mecânica. Quando não há forças que dissipem energia, toda a energia mecânica é conservada. Vejamos os exemplos dados na Figura 1.
Figura 1: (esq.) Corpo em queda livre. (dir.) Carrinho descendo uma montanha russa.
A Figura 1 mostra dois casos: a queda livre a esquerda, e de um carrinho descendo uma montanha russa. Nos dois casos, o corpo está parado e a uma altura $H$ em relação ao solo. A energia mecânica total do corpo no ponto 1 é:
$$E_{M,1} = E_{C,1} + U_{g,1} = 0 + m g H = m g H.$$
Como o corpo está parado no ponto 1, sua velocidade é nula ($v_1 = 0$), portanto, sua energia cinética também é zero ($E_{C,1}=0$). No ponto 2, o objeto está a uma altura zero em relação ao solo, e se movendo com uma velocidade $v_2$ que desconhecemos. Portanto, sua energia mecânica total é dada por:
Se não houver nenhum tipo de força que dissipe energia mecânica (força de atrito com o ar e/ou com o trilho, por exemplo), a energia mecânica total do sistema será conservada, ou seja, será a mesma para os pontos 1 e 2 ($E_{M,1}=E_{M,2}$). Se soubermos a altura $H$ inicial, podemos tirar proveito da conservação da energia mecânica e determinar a velocidade no ponto 2:
$$m g H = \frac{m v_2^2}{2} ~~ \rightarrow ~~ v_2^2 = 2 g H$$
O mais surpreendente desse resultado é que ele independe da massa $m$ do objeto, e também do caminho total percorrido pelo objeto. Note que na queda livre, o corpo percorre apenas uma distância $H$, que é altura de onde o corpo cai. No caso da montanha russa, o carrinho percorre o comprimento $L$ entre os pontos 1 e 2 da pista, que é maior que a altura inicial $H$. Isto só acontece porque o campo gravitacional é dito conservativo (ou seja, conserva energia mecânica), e o que interessa de fato são apenas as posições inicial e final do objeto em relação a superfície da Terra, e não o caminho percorrido.
E se houver forças dissipativas?
Se, em qualquer uma das situações mostradas na Figura 1, houver forças que dissipem a energia mecânica do sistema como a força de resistência do ar e/ou força de atrito com o trilho da montanha russa, a energia mecânica total não será conservada. Neste caso, teremos $E_{M,1} \neq E_{M,2}$. Mas é interessante saber o que ocorre com a diferença de energia mecânica entre os pontos 1 e 2:
A equação acima mostra que a variação de energia mecânica é simplesmente a soma das variações de todos os tipos de energia mecânica. No nosso caso específico da Figura 1, temos que
$$ \Delta E_M = \frac{m v_2^2}{2}~-~m g H.$$
Agora pensemos o seguinte, se houver qualquer tipo de atrito (com o ar e/ou trilho), a velocidade no ponto 2 será menor que na situação em que não há atrito. Portanto, obteremos $\Delta E_M < 0$ sempre !!!! Por outro lado, se $\Delta E_M >0$, é porque a velocidade do corpo no ponto 2 é maior do que quer deveria ser na situação em que não há atrito. E isso só pode ocorrer com uma única condição, houve alguma forma de energia dada ao corpo que serviu de propulsão para ganho de velocidade !!!
O experimento
Para estudar a conservação da energia mecânica, vamos utilizar o experimento mostrado na Figura 2, onde simulamos um trecho de queda de uma montanha russa. Vamos soltar dois carrinhos (de massas diferentes) de várias alturas diferentes, e medir sua velocidade na parte horizontal da pista.
Figura 2: Pista montada para o experimento de conservação da energia mecânica.
Se houver conservação de energia mecânica no nosso experimento, sabe-se que $v_1^2 = 2 g H$, então o gráfico $v_1^2$ vs $H$ construído com os dados de cada lançamento deve ser uma linha reta cujo coeficiente linear é igual a $2 g$, independente portanto da massa do carrinho. Se os dados experimentais ficarem abaixo desse gráfico, é porque há algum tipo de atrito no nosso experimento. Se ficarem acima, é porque há algum tipo de propulsão sendo dada aos carrinho, conforme mostrado na Figura 3.
Figura 3: Diagrama de $V^2$ vs $H$ mostrando as regiões de ganho, conservação e dissipação de energia.
Medidas
A Figura 4 mostra a tabela dos dados medidos para dois carrinhos diferentes (os mesmos do post anterior sobre a física do lançamento oblíquo). Ao todo foram realizados 10 lançamentos variando entre uma altura mínima de 25,5 cm e uma altura máxima de 57,5 cm.
Figura 4: Medidas de velocidade em função da altura de dois carrinhos Hotwheels diferentes. Os dados medidos estão abaixo da linha de conservação de energia que obedece $V^2 = 2 g H$ ($g = 9,81~m/s^2$), evidenciando uma pequena dissipação de energia. O arquivo em Excel pode ser baixado aqui.
É interessante notar que os dados dos dois carrinhos são idênticos, apesar das massas e tamanhos diferentes, e apresentando os valores de $v^2$ ligeiramente abaixo da linha teórica de conservação de energia. Para o lançamento de $H$ = 57,5 cm, a perda de energia é de menos de 1%, já para $H$ = 25,5 cm, a perda de energia é de cerca de 13%. No nosso sistema há três mecanismos principais de dissipação de energia: atrito nos pneus dos carrinhos, atrito com a pista, e a resistência do ar. Em princípio, é basta difícil separar a contribuição de cada um destes efeitos sem a montagem de experimentos mais sofisticados.
É importante também mencionar que há outra contribuição de energia mecânica que não foi considerada no problema: a energia cinética associada a rotação dos pneus. Embora este efeito seja bem complicado de explicar sem um experimento mais detalhado, acredito que esta contribuição é muito pequena devido ao pequeno diâmetro dos pneus, e tem pouco impacto nos resultados.
Apesar do pequeno efeito de dissipação de energia mecânica, concluo que, em uma primeira aproximação, podemos considerar que a energia mecânica foi conservada neste experimento.
Assista aqui demonstração deste experimento em vídeo:
Observação sobre a medida da velocidade
Neste experimento, a velocidade foi medida usando o sensor de passagem descrito aqui, mas com uma pequena modificação. Como foram feitas muitas medidas em alturas muito próximas umas das outras, foi necessário mudar o código do Arduino para que ele medisse os tempos de passagem com precisão de microssegundos. Utilizamos o mesmo código descrito aqui, mas trocando a chamada da função millis() pela função micros(). Segue abaixo o código utilizado para medir tempos de passagem com precisão de microssegundos.
// Definição das entradas
// define o pino digital 3 como entrada do fototransistor
const int FOTOpin = 3;
bool ligado = false;
long dt;
void setup() {
// coloque aqui o código de inicialização que será executada apenas uma vez.
// configuração do pino 3 como entrada
pinMode(FOTOpin, INPUT);
// inicializa a saída serial do Arduino
Serial.begin(9600);
}
void loop() {
// put your main code here, to run repeatedly:
// leitura do fotodiodo
int v1 = digitalRead(FOTOpin);
// detecta se um objeto chegou no sensor
if ((v1 == HIGH) & (ligado == false)){
ligado = true;
dt = micros();
}
// detecta se um objeto saiu do sensor
if ((v1 == LOW) & (ligado == true)){
ligado = false;
dt = micros() - dt;
Serial.print("Tempo de passagem (micro seg.) = ");
Serial.println(dt);
}
}
O lançamento oblíquo é um dos problemas mais interessantes da cinemática, e nós vamos utilizar o sensor de velocidade do post anterior para estudar o lançamento oblíquo utilizando uma pista e carrinhos Hotwheels.
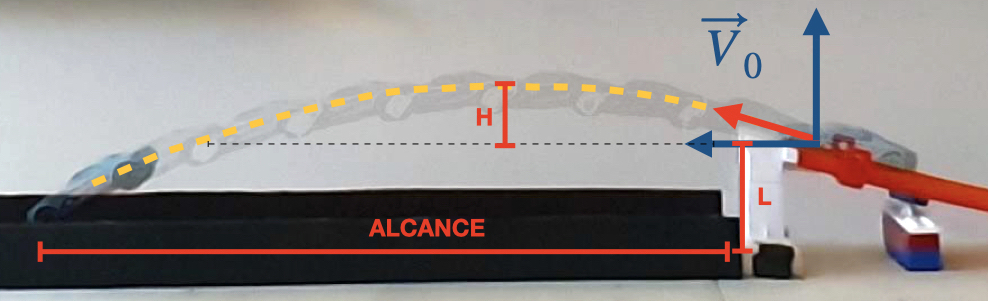
O salto do Hotwheels como um lançamento oblíquo
A Figura 1 mostra uma composição de fotos com a trajetória que o carrinho faz durante um salto. A trajetória lembra a um lançamento oblíquo que estudamos na escola, mas note que o ponto de lançamento está a uma altura $L$ acima do nível onde ele cai.
Figura 1: Salto de um carrinho Hotwheels mostrando a trajetória, a altura máxima atingida e o alcance do salto. O carrinho deixa a rampa com velocidade $V_0$. Diferente do lançamento oblíquo tradicional, este salto ocorre a uma elevação L = 5,5 cm.
Agora veja como é legal o salto em câmera lenta!
Vídeo: Salto em câmera lenta.
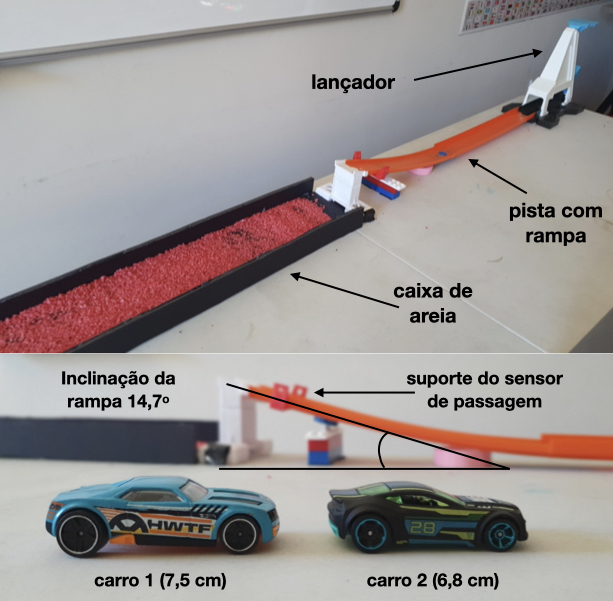
Para estudar a física deste salto, utilizei uma pista Hotwheels composta por um lançador que põe o carrinho em movimento, uma rampa e uma caixa de areia para amortecer e marcar o ponto queda (como no salto a distância do atletismo), mostrada na Figura 2.
Figura 2: pista de salto com lançador, rampa e caixa de areia para amortecer e marcar o ponto exato de queda. Foram usados 2 carrinhos no experimento. O sensor de passagem é o mesmo do post anterior.
Quando acionamos o lançador, o carrinho é colocado em movimento com uma velocidade que depende da força com que batemos no lançador. O carrinho sobe a rampa, e realiza o salto. Se a a física estiver correta, o alcance do salto depende apenas do ângulo da rampa, da altura da rampa, e da velocidade com que o carrinho é lançado pela rampa.
A angulação foi determinada com ajuda de uma régua, e a velocidade de lançamento pode ser medida adaptando-se o sensor de passagem na rampa. Tudo o que precisamos e saber o tamanho do carro e o tempo de passagem do carro pelo sensor com ajuda do Arduino, conforme mostrado no post anterior.
A física do lançamento oblíquo
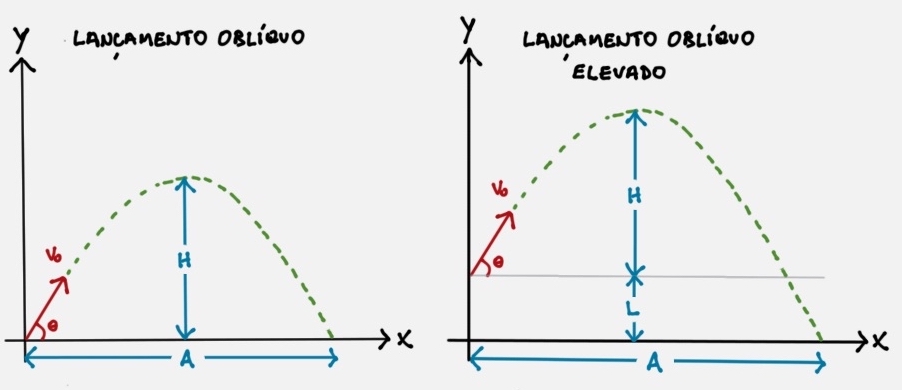
O lançamento oblíquo consiste em corpo lançado com uma velocidade $V_0$ fazendo um ângulo $\theta$ com a horizontal, conforme mostrado na Figura 3.
Figura 3: (esq.) Lançamento oblíquo. (dir.) Lançamento oblíquo elevado quando o corpo é lançado de uma altura L. Como veremos a seguir, o lançamento oblíquo elevado descreve melhor o salto de uma rampa.
Se, após o lançamento a gravidade for a única força atuando no corpo (nenhum efeito da resistência do ar), o corpo realiza um MRU (movimento retilíneo uniforme) na direção horizontal, e um MRUV (movimento retilíneo uniformemente variado) na direção vertical. As coordenadas $x(t)$ e $y(t)$ do corpo são dadas por:
$$x(t) = x_0 + V_{0x} t$$
$$y(t) = y_0 + V_{0y} t – \frac{g}{2}t^2$$
onde $(x_0,y_0)$ é a posição inicial do corpo, $V_{0x} = V_0 \cos \theta$ e $V_{0y} = V_0 \sin \theta$, e $g$ é a aceleração da gravidade. Este conjunto de equações descreve uma trajetória parabólica com uma altura máxima de
$$H = \frac{\sin^2\theta}{2 g}V_0^2$$
e um alcance dado por
$$A = \frac{\sin 2\theta}{g}V_0^2$$
O lançamento oblíquo com elevação
No salto do Hotwheels, o carrinho obedece um lançamento oblíquo com elevação. O alcance deste salto é determinado por:
$$A = V_{0x}(t_s+t_d)$$
Onde $t_s$ é o tempo de subida, e $t_d$ o tempo de descida. Estes tempos podem ser facilmente calculados tirando-se vantagem do fato de que o corpo realiza um MRUV na direção vertical.
$$t_s = \frac{V_{oy}}{g}$$
$$t_d=\sqrt{\frac{2(H+L)}{g}}$$
Para encontrar uma expressão bonitinha para o alcance tem um pequeno truque matemático. No nosso experimento, sabemos qual é a altura $L$ da rampa, mas não sabemos em princípio qual a altura $H$, pois não temos como medí-la neste experimento. E isso impede que a gente determine $t_d$ com precisão. Mas a gente assume que $L<H$ (também não é garantido), de forma que obtemos:
Para obter a expressão de $t_d$ acima, usamos a famosa expansão de Taylor $(1+x)^n \approx 1 + n x$ (valido apenas se $|x| < 1$), onde $n=1/2$ e $x = L/H$. Com os valores de $t_s$ e $t_d$ acima, finalmente encontramos que a altura máxima e o alcance do salto são dados por:
Note que a expressão do alcance se assemelha a uma função do tipo $y = b x + c$, onde $y = A$, $b = \sin 2\theta/g$, $x = V_0^2$ e $c = L/\tan \theta$. Note também que o alcance independe do comprimento e da massa dos carrinhos Hotwheels. Portanto, os resultados devem ser idêntico para carrinhos diferentes.
Se a teoria acima estiver correta, ao medirmos $A$ e $V_0$ de vários lançamentos de carrinhos diferentes e construirmos um gráfico de $A$ vs $V_0^2$, devemos obter um gráfico semelhante ao da Figura 4.
Figura 4: os símbolos representam as medidas de alcance e velocidade obtidas em vários lançamentos de diferentes carros. A Linha vermelha representa a função que melhor ajusta os dados medidos à equação da teoria.
O experimento
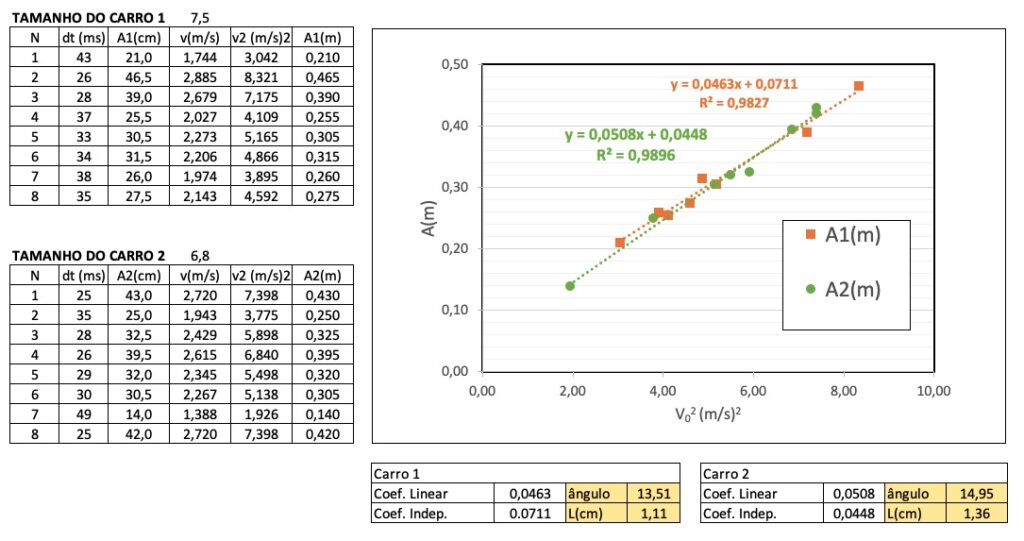
Eu fiz uma série de experimentos com dois carrinhos diferentes, que foram lançados várias vezes cada um, com diferentes velocidades. Os dados obtidos são mostrados na Figura 5.
Figura 5: tabela de medidas e gráficos de 8 lançamentos feitos com dois carrinhos diferentes. Esta tabela foi construída em Excel e pode ser baixada aqui.
A Figura 5 mostra os dados medidos para 2 carros Hotwheels com diferentes tamanhos e pesos. Como não tenho controle da velocidade, os lançamentos não possuem nenhum ordem específica. Os saltos do carro 1 são indicados por quadrados laranja, e os saltos do carro 2 por círculos verde. Os dados de cada carro independente de fato se assemelham a uma reta sugerida pela Figura 3. Note também que as retas de cada carro são similares mas não são idênticas.
O coeficiente linear do carro 1 é $b_1 = 0,0463$ e do carro 2 é $b_2 = 0,0508$. Como os coeficiente linear deve ser tal que $b = \sin 2\theta/g$, se usamos $g = 9,81 m/s^2$, encontramos que a angulação da rampa para o carro 1 deve ser $\theta_1 = 13,51^o$, e para o carro 2 deve ser $\theta_1 = 14,95^o$. O valor real da angulação da rampa utilizada (medida com ajuda de uma régua) é de $\theta_{real} \approx 14,7^o$. Temos portanto um erro de aproximadamente 8% no carro 1, e de 2% no carro 2 na estimativa do ângulo de lançamento.
Já para o coeficiente independente, para o carro tem-se $c_1 = 0,0711$, e para o carro 2 $c_2 = 0,0448$. O coeficiente independente é tal que $c = L\tan \theta$. Usando-se os valores de ângulo estimados para cada carro, os valores estimados de $L$ são $L_1 = 1,11$ cm para o carro 1, e $L_2 = 1,36$ cm para o carro 2. O valor exato na pista é de $L = 5,5$ cm. Obtivemos portanto um erro grande da ordem de 75%.
Conclusões
Os dados do salto dos carrinhos estão de acordo com a física do lançamento oblíquo, pois o gráfico de $A$ vs $V_0^2$ representa uma linha reta, conforme previsto pela teoria do lançamento oblíquo. As medidas também apontam para um valor de ângulação da rampa muito próximo do valor do real (com erro máximo de 8%). Isto também indica que o salto do carrinho obedece à física do lançamento oblíquo que a aprendemos na escola.
Por outro lado, os valores estimados de $L$ apresentaram um erro muito grande comparado ao valor real da pista. Este erro pode ser melhorado se aumentarmos o número de lançamentos para cada carrinho, especialmente para baixas velocidades. A velocidade mais baixa medida para o carrinho 1 foi de 1,744 m/s (alcance de 21 cm), e de 1,388 m/s para o carrinho 2 (alcance de 14 cm). Seria necessário mais medidas com velocidade menores que estas para que a estimativa de $L$ fosse mais próxima do valor real da pista utilizada. Uma outra razão possível que a exigência $L<H$ para justificar a expansão de Taylor pode estar sendo violada, uma vez que a rampa utilizada tem uma angulação suave de apenas $14,7^o$. Neste caso, o termo independente $L/\tan \theta$ na fórmula do alcance precisa de correção.
De qualquer forma, estou satisfeito com os resultados obtidos e podemos concluir que o salto dos carrinhos Hotwheels obedecem sim às leis da física do lançamento oblíquo!
Assista aqui a demonstração em vídeo deste experimento:
(Atualização em 07/11/2021): No final do post tem uma lista atualizada de experimentos feitos com este sensor.
No post anterior aprendemos a dar os primeiros passos com Arduino. E agora chegou a hora de desenvolvermos um sensor muito simples que servirá de base para vários experimentos: um sensor de passagem.
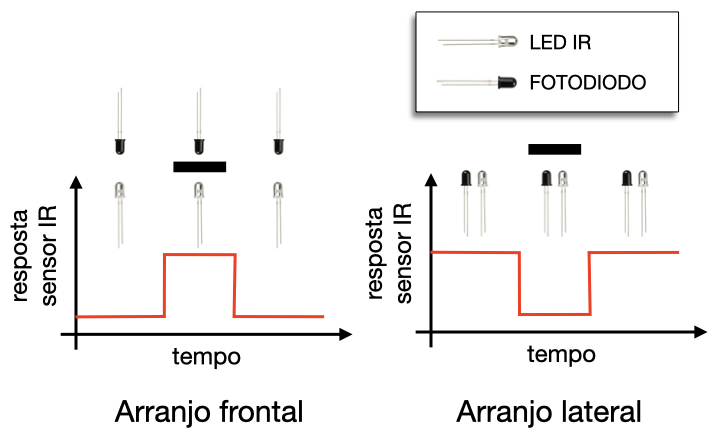
Este sensor tem um princípio de funcionamento bastante simples: coloca-se um LED IR frontalmente iluminando um fototransistor (FT). Se houver luz chegando no FT, ele manda um sinal de “ligado” ao Arduino. Se houver algum obstáculo entre os dois impedindo que o LED ilumine o FT, ele manda um sinal de “desligado” para o Arduino.
Um outro arranjo possível é o arranjo lateral. O LED é posicionado lateralmente ao FT, e a iluminação deste pelo LED acontece por reflexão. Nesta configuração, o comportamento do FT se inverte: o sinal de “ligado” é enviado somente se houver algum obstáculo na frente do sensor que reflita a luz do LED. A Figura 1 mostra a resposta do sensor no arranjo frontal e no arranjo lateral.
Figura 1: arranjos frontal e lateral do LED em relação ao fotodiodo.
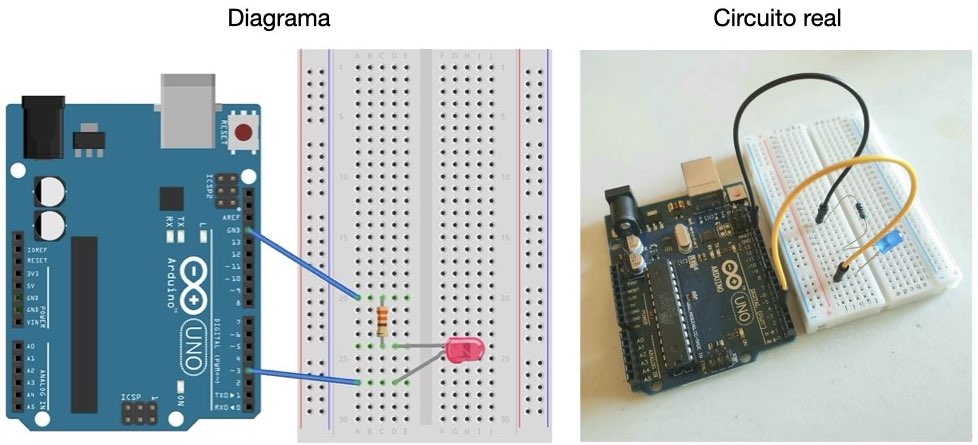
Circuito do sensor de passagem
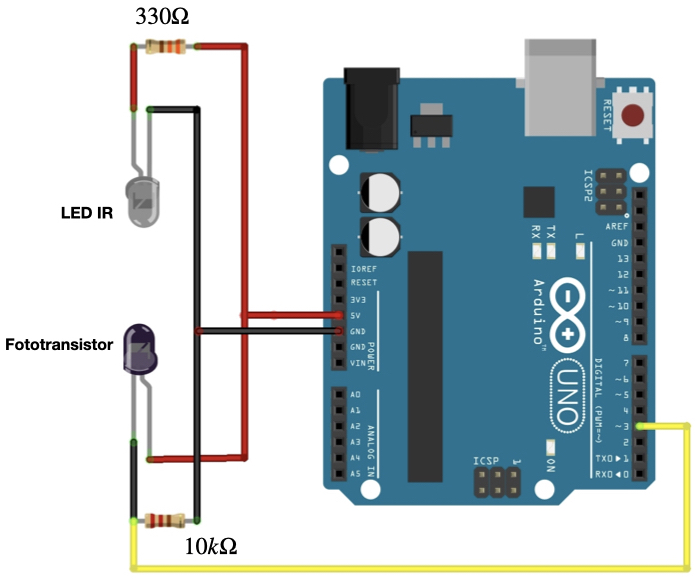
O sensor de velocidade acima descrito pode ser facilmente construído com o Arduino Uno usando-se o diagrama abaixo:
Figura 2: Circuito do sensor de passagem.
A Figura 2 mostra que apenas 3 portas do Arduino são utilizadas. As portas 5V e GND fornecem energia para o LED e FT. O estado do FT pode ser lido tanto numa porta analógica, quanto numa porta digital. Mas preferi a porta digital (aqui escolhi a porta digital 3) porque há apenas dois estados possíveis: “ligado” ou “desligado”. Se utilizássemos a porta analógica, teríamos de nos preocupar em detectar valores entre 0 e 1023, e tentar entender se o sensor está no estado “ligado” ou “desligado”.
Vamos demonstrar o circuito acima de duas formas. A primeira forma é mais simples, e serve apenas para observar graficamente o funcionamento básico do sensor de passagem. Na segunda demonstração, iremos escrever um código que mede o tempo de passagem pelo sensor.
Sketch Arduino (1a. demonstração)
Na primeira demonstração, o Arduino monitora a porta digital onde o FD está conectado, envia o valor medido para a porta serial, enquanto nós observamos o valor de saída. Veja o código abaixo:
// Definição das entradas
// define o pino digital 3 como entrada do fototransistor
const int FOTOpin = 3;
void setup() {
// coloque aqui o código de inicialização que será executada apenas uma vez.
// configuração do pino 3 como entrada
pinMode(FOTOpin, INPUT);
// inicializa a saída serial do Arduino
Serial.begin(9600);
}
void loop() {
// put your main code here, to run repeatedly:
// leitura do fotodiodo
int v1 = digitalRead(FOTOpin);
// escreve a leitura do fototransistor na porta serial
Serial.println(v1);
}
Faça o upload do código acima para o Arduíno, clique no menu TOOLS/SERIAL PLOTTER para observar a leitura do FD. Passe a mão entre o LED e o FD e veja o que acontece.
Sketch Arduino (2a. demonstração)
Na segunda demonstração, o Arduino vai monitorar o FD e medir o tempo de passagem do objeto pelo sensor.
// Definição das entradas
// define o pino digital 3 como entrada do fototransistor
const int FOTOpin = 3;
bool ligado = false;
long dt;
void setup() {
// coloque aqui o código de inicialização que será executada apenas uma vez.
// configuração do pino 3 como entrada
pinMode(FOTOpin, INPUT);
// inicializa a saída serial do Arduino
Serial.begin(9600);
}
void loop() {
// put your main code here, to run repeatedly:
// leitura do fotodiodo
int v1 = digitalRead(FOTOpin);
// detecta se um objeto chegou no sensor
if ((v1 == HIGH) & (ligado == false)){
ligado = true;
dt = millis();
}
// detecta se um objeto saiu do sensor
if ((v1 == LOW) & (ligado == true)){
ligado = false;
dt = millis() - dt;
Serial.print("Tempo de passagem (ms) = ");
Serial.println(dt);
}
}
Faça o upload do código acima para o Arduíno, clique no menu TOOLS/SERIAL MONITOR para observar o conteúdo da porta serial. Passe a mão entre o LED e o FD e veja o que acontece. Não há mais uma descrição gráfica do sinal do FD, mas sim mensagens mostrando a duração em milissegundos da passagem de um objeto pelo sensor. Se conhecermos o tamanho do objeto é possível determinar a velocidade de passagem dele pelo sensor.
Sensor de passagem como um sensor de velocidade
Imagine que o nosso sensor acima possa ser montado de forma que um objeto de comprimento $L$ passe pelo sensor. Quando o objeto passa pelo sensor, a luz do LED no FT vai ser bloqueada por um tempo $\Delta t$. Assumindo que a largura do feixe do LED é infinitamente estreito, o objeto percorre uma distância $\Delta x = L$ ao cruzar o sensor. A velocidade média do objeto de comprimento $L$ ao passar pelo sensor é dada por:
$$\bar{v} = \frac{L}{\Delta t}.$$
O funcionamento básico do sensor é mostrado na animação abaixo:
Adaptando o sensor para medir a velocidade de uma NERF
Adaptei o sensor para medir a velocidade de carrinhos de brinquedo sobre umaa mesa e funcionou legal. Mas veio a pergunta “Será que este sensor funciona para coisas que se movem muito rápido?”. Daí resolvi testá-lo para medir a velocidade do objeto mais rápido a minha disposição: uma NERF. Para quem não sabe, NERF é aquela arma de brinquedo que atira dardos macios.
Um dardo de NERF (que peguei de um brinquedo que meu filho não brinca mais) tem 73 mm, e o tempo de passagem pelo sensor variou entre 4 ms e 5 ms. Usando-se o valor médio de 4.5 ms a velocidade de um tiro de NERF atinge impressionantes 58,4 km/h !!!!!!!
Tentei checar esse valor em outras fontes, e descobri neste vídeo aqui, que velocidade da NERF depende do modelo. No vídeo, um homem testa 5 modelos de NERF e mede velocidades que variam aproximadamente entre 50 km/h e 70 km/h, dependendo do modelo.
Fiquei muito feliz que o nosso sensor de passagem foi capaz de fornecer valores compatíveis com outras medições feitas com instrumentos profissionais de alta precisão.
Conclusões: um sensor, muitos experimentos
Em conclusão, nosso sensor baseado em Arduino, além de simples e barato, é bastante preciso. Como o título deste post já fala, este sensor servirá de base para uma série de experimentos muito interessantes nos próximos posts. ATUALIZAÇÃO IMPORTANTE (feita em 07/08/2021): No post Conservação da energia mecânica com Hotwheels e Arduino, eu mostrei como mudar o código acima para aumentar a precisão do sensor de milissegundos para microssegundos, e obter velocidades ainda mais precisas.
Lista de experimentos feitos com apenas um sensor de velocidade (atualizado em 07/09/2021):
No post anterior, a gente aprendeu o que é o Arduino e o que ele pode fazer. É chegada a hora de colocar a mão na massa. Nosso primeiro projeto tem duas etapas. Na etapa inicial vamos fazer um led piscar. Na etapa seguinte, iremos controlar manualmente a frequência das piscadas do led usando um potenciômetro.
Para executar todo o projeto você dos seguintes itens:
Placa Arduino UNO
Protoboard
Um led de qualquer cor (evite led infravermelho, senão não conseguiremos enxergar)
Um resistor (usei um de 330 Ohms)
Alguns fios condutores
Um potenciômetro (apenas para a 2a. parte)
Obs.: Para iniciar no mundo Arduino é recomendável algum conhecimento básico de circuitos elétricos e de programação, pois fica mais fácil entender a montagem do circuito. Mas se você não tiver experiência prévia, basta seguir este tutorial o mais fielmente possível que tem tudo para dar certo.
Passo 1: baixe e instale Arduino IDE
Já sabemos que o Arduino é um microprocessador que executa um único programa (chamado de firmware). Este firmware pode ser escrito em vários plataformas de desenvolvimento (Arduino IDE, Processing, Scratch) que vocês instala no seu computador. Não sei dizer se existem vantagens/desvantagens comparativas entre as plataformas. Eu utilizo o Arduino IDE, pois é mais comum, e a única que eu tenho experiência. Para baixar o Arduino IDE, clique aqui. Baixe a versão adequada para o seu sistema operacional (Windows, Mac OS, Linux). Eu uso Mac OS, mas este tutorial também serve para as outras plataformas.
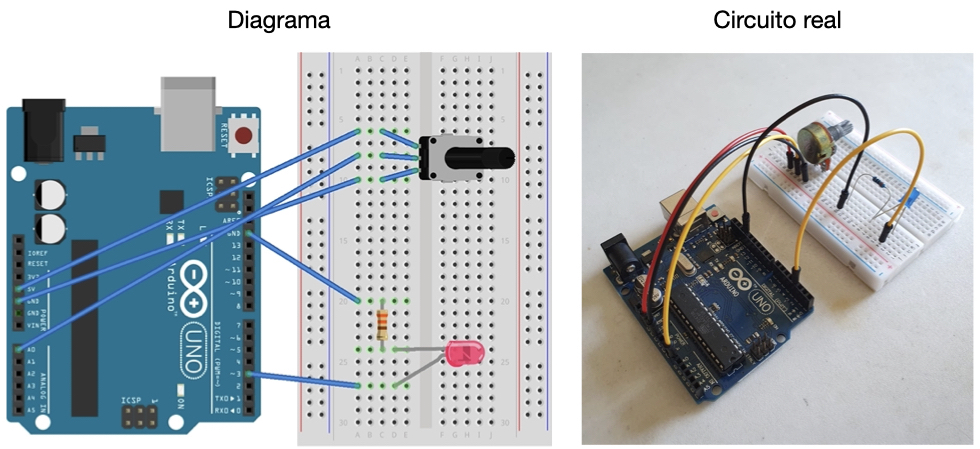
Passo 2: Monte o circuito (1a. parte)
Monte o circuito de acordo com o diagrama abaixo. Tome muito cuidado para encaixar as extremidades de cada component no lugar indicado para que o circuito esteja fechado.
Figura 1
Passo 3: Conecte o Arduino ao computador
Aqui você vai conectar o seu Arduino ao computador usando o cabo USB que veio junto com o Arduino. Ao conectar o Arduíno o sistema operacional (SO) vai detectar um novo dispositivo em uma das portas seriais do computador.
Abra o Arduino IDE. Uma janela de projeto vazio vai abrir automaticamente. Os projetos são chamados de sketch pelo Arduino IDE. A linguagem de programação do Arduino é muito similar a C/C++.
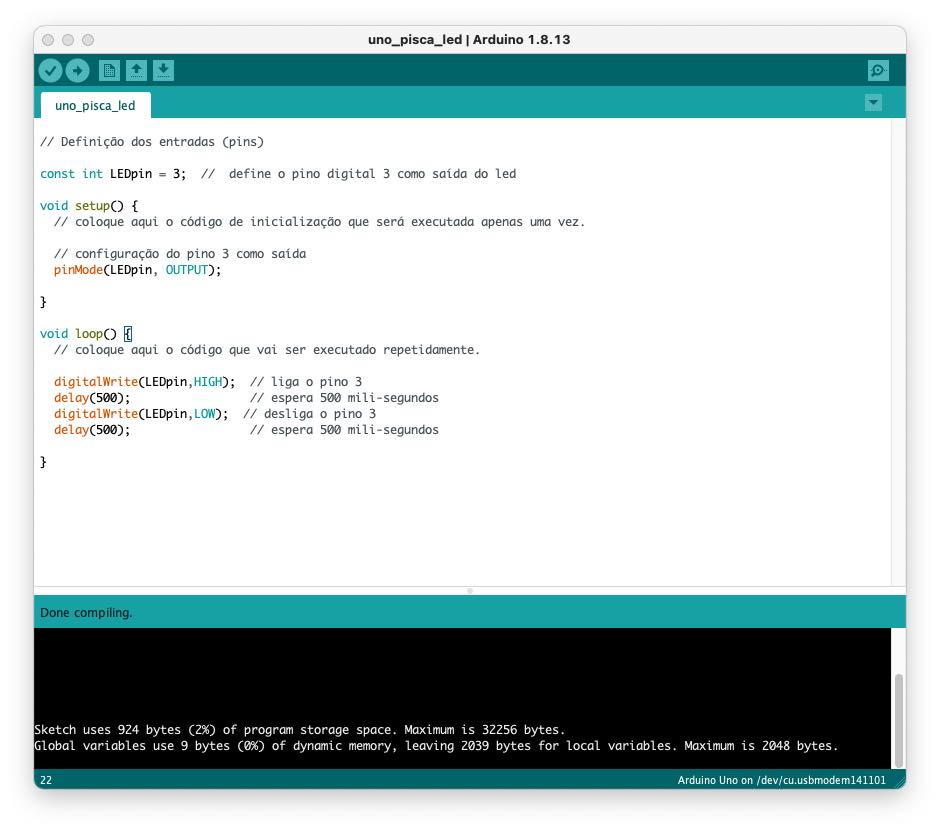
Figura 2: Janela de um sketch vazio. Note que o sketch foi renomeado como uno_pisca_led.
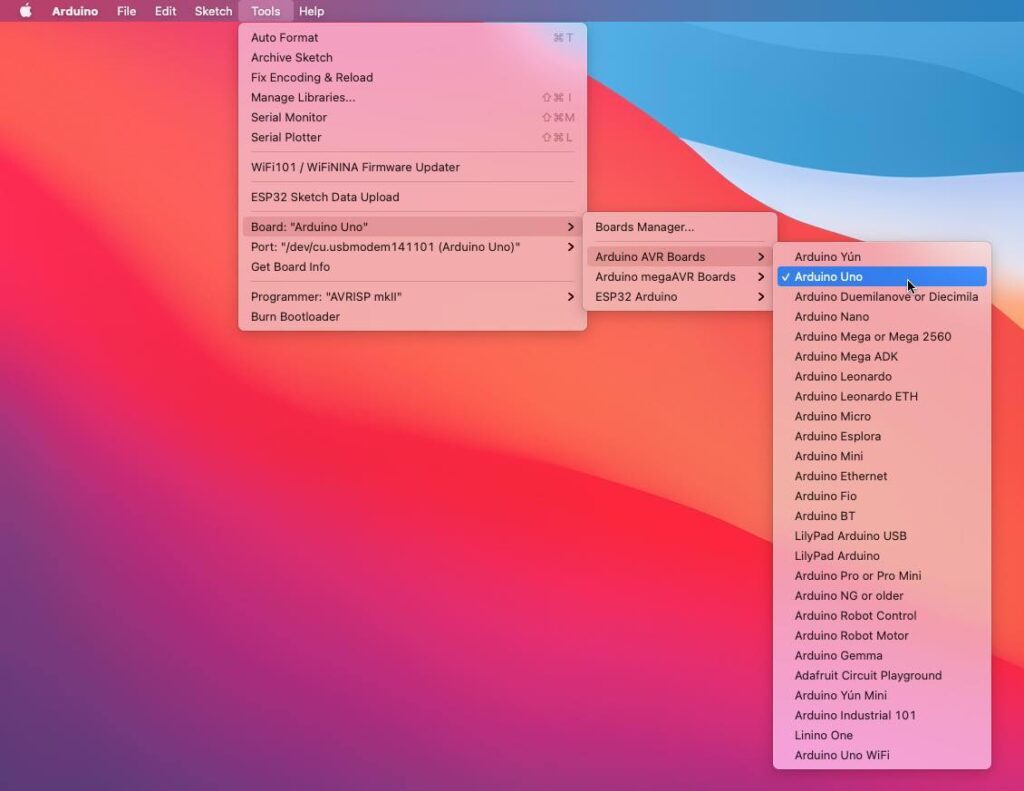
Precisamos informar ao Arduino IDE qual o tipo de placa Arduino que vamos usar (ele não detecta o tipo de placa automaticamente), e em qual porta serial. O Arduino Uno é a placa usada neste projeto. Para configurar a placa, acesse o menu TOOLS/BOARD/ARDUINO AVR BOARDS/ e selecione Arduino Uno, conforme mostrado na Figura 3.
Figura 3: Selecionando o modelo da placa Arduino.
O Arduino IDE também precisa saber em qual porta serial a sua placa está conectada. Para isso, acesse o menu TOOLS/PORT/ e selecione a porta correta entre as opções listadas. No Windows, estas portas são nomeadas como COM1, COM2, COM3 e assim por diante. No linux/Mac estas portas possuem nomes estranhos que lebram o nome de um diretório. Por exemplo, no meu computador a porta serial na qual meu Arduino Uno está ligada chama-se /dev/cu.usbmodem141101. A esta altura, você já deve estar com o sistema todo pronto para começar a escrever o código.
Passo 4: Código
A Figura 2 (acima) mostra que a estrutura básica de qualquer sketch Arduino é formada por duas rotinas principais: setup() e loop(). A rotina setup() é executado apenas uma única vez logo após o Arduino ser ligado. Aqui é importante fazer a inicialização necessária dos componentes e sensores do seu projeto. Esta etapa assemelha-se àquele monte de programa que é executado assim que você liga seu computador.
Depois de executada a rotina setup(), o Arduino passa a executar a rotina loop() de forma contínua enquanto o Arduino estiver ligado. Aqui a gente codifica as instruções que queremos que o Arduino execute ininterruptamente.
Antes da rotina setup(), é necessário declarar algumas variáveis ou constantes globais que serão utilizadas no interior de cada rotina.
// Definição das entradas (pins)
const int LEDpin = 3; // define o pino digital 3 como saída do led
Aqui apenas uma constante chamada LEDpin recebe o valor 3 que é justamente a porta lógica do Arduino que iremos ligar e desligar para fazer o LED piscar. A rotina setup() tem a seguinte forma:
void setup() {
// coloque aqui o código de inicialização que será executada apenas uma vez.
pinMode(LEDpin, OUTPUT); // configuração do pino 3 como saída
}
Esta rotina apenas informa ao Arduino que a porta lógica 3 (representada pela constante LEDpin) vai funcionar no modo de saída (OUTPUT), ou seja, não vamos ler o conteúdo desta porta, mas sim escrever o conteúdo dela. Como trata-se de um porta lógica, podemos escrever nela apenas os valores ligada ou desligada.
Finalmente chegamos na rotina loop():
void loop() {
// coloque aqui o código que vai ser executado repetidamente.
digitalWrite(LEDpin,HIGH); // liga o pino 3
delay(500); // espera 500 mili-segundos
digitalWrite(LEDpin,LOW); // desliga o pino 3
delay(500); // espera 500 mili-segundos
}
Esta rotina será executada continuamente. Em cada chamada, a rotina executa 4 passos. Primeiro escrevemos na porta LEDpin o estado ligado. Isto vai ligar o LED. Daí, solicitamos ao Arduino para esperar 500 ms antes de passar para o próximo comando. Durante este tempo, o LED ficará ligado. Depois desligamos a porta LEDpin, que apaga o LED, e mais uma vez avisamos para o Arduino esperar 500 ms. Durante esta segunda pausa, o LED fica desligado. Como não há mais nenhum comando, a rotina loop() é finalizada, para então ser chamada novamente, executando todo o ciclo liga o LED, espera 500 ms, desliga o LED, espera mais 500 ms. O ciclo será repetido indeefinidamente enquanto o Arduino estiver ligado. Finalmente o código completo fica:
// Definição das entradas (pins)
const int LEDpin = 3; // define o pino digital 3 como saída do led
void setup() {
// coloque aqui o código de inicialização que será executada apenas uma vez.
pinMode(LEDpin, OUTPUT); // configuração do pino 3 como saída
}
void loop() {
// coloque aqui o código que vai ser executado repetidamente.
digitalWrite(LEDpin,HIGH); // liga o pino 3
delay(500); // espera 500 mili-segundos
digitalWrite(LEDpin,LOW); // desliga o pino 3
delay(500); // espera 500 mili-segundos
}
Copie o código completo acima e cole na janela do seu sketch, que deve ficar assim:
Figura 4: Sketch com código completo.
Passo 4: Compilar e carregar o código para o Arduíno
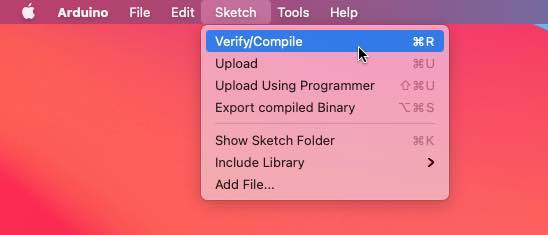
Para compilar o código clique no menu SKETCH/VERIFY/COMPILE/ conforme mostrado na Figura 5., ou clicar no ícone na barra superior da janela do sketch (ver Figura 4). O Arduino IDE vai analisar o código para ver se não nenhum erro, e gerar uma versão executável do programa.
Figura 5: Compilando o sketch.
Se o código for compilado sem erro, A mensagem “Done compiling.” vai aparecer na barra inferior da janela de sketch. o último passo a ser executá-lo é transferir o programa para o Arduino. Para isso, clique no menu SKETCH/UPLOAD (veja Figura 5) ou clique no ícone na barra superior da janela de sketch (Figura 4).
Se tudo ocorrer bem, vaia aparecer uma mensagem “Done uploading.” na barra inferior da janela de sketch. o código vai ser carregador para sua placa Arduino, e o LED vai começar a piscar.
Note que a frequência da piscada é fixa, e único jeito de mudar isso é modificar o comando delay(500) na rotina loop(), compilar e fazer novamente o upload do código para a placa.
Passo 5: Montagem do circuito (parte 2)
Acredito que tudo tenha dado de certo até agora, e que você tenha sem empolgado para incrementar um pouco mais a complexidade do projeto. Vamos agora faz modificar o circuito da parte 1 para incluir um potenciômetro para controlar a frequência da piscada. Veja o diagrama abaixo:
Figura 6: circuito com LED e potenciômetro.
Se você já tem alguma prática com circuitos, vai perceber que temos dois circuitos separados. Um circuito para o LED controlado pelo pino digital 3, e um segundo circuito para o potenciômetro. Os terminais mais externos do potenciômetro estão ligados ao pino de 5V e ao aterramento do circuito (GND). A resistência interna é controlada girando-se o seletor do potenciômetro, e pode ser monitorada conectando-se o terminal do meio ao pino analógico A0.
Enquanto uma porta digital (nos modos INPUT ou OUTPUT) pode ter somente os valores “ligada” (HIGH) e “desligada” (LOW), uma porta analógica pode ter qualquer valor entre um valor máximo e um valor mínimo. Como o Arduino Uno possui uma arquitetura interna de 10 bits, as portas analógicas podem medir 1024 (210) valores possíveis, entre 0 a 1023. Para este projeto específico, estes valores representam as resistências mínima e máxima do potenciômetro. A ideia é utilizar a leitura do potenciômetro para determinar a frequência de piscada do LED.
A esta altura você certamente já está mais íntimo de como o Arduino IDE trabalha, então vamos direto ao código:
// Definição das entradas (pins)
const int LEDpin = 3; // define o pino digital 3 como saída do led
const int POTpin = A0; // define o pino analógico A0 como entrada do potenciômetro
void setup() {
// coloque aqui o código de inicialização que será executada apenas uma vez.
// configuração do pino 3 como saída
pinMode(LEDpin, OUTPUT);
// inicializa a saída serial do Arduino
Serial.begin(9600);
}
void loop() {
// coloque aqui o código que vai ser executado repetidamente.
// define duas variáveis inteiras
int valorPot, intervalo;
// lê o valor do pino A0 (0 a 1023)
valorPot = analogRead(POTpin);
// calcula o intervalo de delay do LED
intervalo = 100 + valorPot;
// imprime na porta serial uma mensagem mostrando
// o valor do pino A0 e o intervalo calculado
Serial.print("Leitura do potenciômetro: ");
Serial.print(valorPot);
Serial.print(" Intervalo (ms): ");
Serial.println(intervalo);
// liga o pino 3
digitalWrite(LEDpin,HIGH);
// espera em mili-segundos definida pela variável intervalo
delay(intervalo);
// desliga o pino 3
digitalWrite(LEDpin,LOW);
// espera em mili-segundos definida pela variável intervalo
delay(intervalo);
}
Note que a diferença entre este e o código da primeira parte do projeto é mínima. Alguns poucos comando foram adicionados ao sketch original. Antes da rotina setup(), nós declaramos a constante POTpin para representar o pino A0. Dentro da rotina setup(), existe o comando que inicializa a saída serial para que possamos monitorar o valor lido no pino A0. Dentro da rotina loop(), nós fazemos a leitura do pino A0, usamos este valor para determinar os intervalo entre as piscadas do LED, e mostramos uma mensagem com a informação medida na porta serial. Depois destas instruções, o ciclo acender/esperar/apagar o LED começa. Note que o tempo da piscada do LED varia entre 100 ms e 1123 ms, dependendo do estado do potenciômetro.
Assista aqui o vídeo de demonstração do projeto:
Conclusões
Este foi um post longo pois assumi que alguns leitores podem nunca ter tido contato com o Arduino. Daí a decisão de escrever este post no estilo tutorial. É importante esclarecer que o projeto aqui descrito é bastante introdutório, e o Arduino é capaz de realizar tarefas muito mais complexas do que as descritas acima. Apesar de simples, este projeto possui todos os elementos necessários para desenvolvermos muitos projetos educacionais.
Não pretendo descrever tudo o que é possível ser feito com o Arduino. O objetivo é utilizá-lo em projetos educacionais, e vamos incorporando novos componentes e novas formas de usar o Arduino à medida que a necessidade surgir. Para quem quiser se aprofundar mais, há na internet muitos tutoriais de como usar o Arduino e seus shields.
No post anterior, eu descrevi minhas motivações para criar este blog. E uma das mais importantes foi ter sentido a necessidade de incorporar elementos da cultura maker em minhas aulas de Física. E assim, tentar provocar os estudantes a realizarem/desenvolverem seus próprios experimentos científicos.
Ciências e experimentos
As ciências naturais (Física, Astronomia, Geologia, Biologia) estudam as leis que governam o mundo natural através de métodos científicos, cujos pilares são dados quantitativos. Neste aspecto, a Matemática não é um ciência natural pois sua validade não é determinada por experimentos científicos, mas sim uma linguagem descritiva dos fenômenos naturais. Por exemplo, Newton inventou o Cálculo para descrever o movimento dos corpos. Para os interessados em se aprofundar um pouco mais nesta discussão, sugiro este capítulo do famoso livro The Feynman Lectures on Physics.
A importância dos experimentos científicos para obter dados quantitativos é melhor descrita pela célebre frase de Lord Kelvin (aquele da escala de temperatura Kelvin): “medir é saber”. Lord Kelvin acreditava só temos conhecimento daquilo que conseguimos medir e expressar esse conhecimento em números. Se não conseguirmos medir algo, pouco ou nada sabemos sobre ele.
Para construir experimentos científicos é necessário compreender o que são grandezas físicas e suas unidades. Algumas grandezas físicas são tão fundamentais que são descritas em termos de como são medidas: comprimento, tempo, massa e temperatura. Nem é preciso se esforçar muito para explicá-las pois são tão fundamentais que já estão incorporadas ao nosso senso comum. Outras grandezas físicas são determinadas, por exemplo, em função das grandezas fundamentais como é o caso da velocidade (distância percorrida por unidade de tempo), e aceleração (variação de velocidade por unidade de tempo). Há muitas outras grandezas, e uma discussão mais completa sobre grandezas físicas e suas unidades de medida foge um pouco do objetivo deste post.
Nos experimentos científicos, as grandezas físicas são medidas por sensores, e armazenadas para posterior análise de diferentes formas. No passado, as grandezas físicas eram medidas e anotadas em um caderno de laboratório. Em muitos laboratórios de ensino, esse ainda é o método dominante. Pelo lado pedagógico até que faz sentido fazer tudo manualmente. Nos coloca no mesmo lugar que os gigantes da ciência estavam 50, 100 ou 200 anos atrás. Por outro lado, estes avanços científicos evoluíram muito lentamente justamente porque os pesquisadores do passado ainda tinham de projetar os equipamento para realizar a medidas, e só depois podiam se concentrar no fenômeno natural que os deixou curiosos inicialmente.
Hoje temos muitas opções tecnológicas que certamente os pesquisadores do passado teriam usado para acelerar suas descobertas. E podemos fazer isso sem perder a essência do pensamento científico envolvido na construção de experimentos.
Atualmente, a base tecnológica mais simples para desenvolver experimentos para medir grandezas físicas com uma rápida e suave curva de aprendizado é o Arduino.
O que é o Arduino
Placa Arduino UNO
Arduíno é uma plataforma de microprocessadores muito utilizada em projetos eletrônicos devido a sua versatilidade e simplicidade. O Arduíno é amplamente utilizado tanto em projetos comerciais como em projetos educativos.
Microprocessador é outro nome para um tipo de computador altamente especializado que roda apenas um único programa chamado firmware. Um microprocessador não possui monitor, mouse e nem teclado, mas possui uma pequena memória interna que representa o seu disco rígido, e é onde o firmware fica armazenado. Por outro lado, o Arduino possui muitas entradas lógicas onde podemos acoplar circuitos externos, sensores, pequenas telas de LCD, pequenos botões de comando e outros acessórios. Estes acessórios para Arduíno são conhecidos como shields.
O Arduino também pode se comunicar com outros dispositivos e até mesmo com a internet, dependendo do tipo de shield acoplado a ele. E é justamente esta flexibilidade de comunicação que torna o Arduino uma das plataformas mais utilizadas nas aplicações do tipo Internet da Coisas (ou IoT – Internet of Things). Um outro grande atrativo é o baixo custo. No Mercado Livre, Um placa do tipo Arduino UNO custa aproximadamente R$ 50,00, e um kit para iniciantes (placa mais alguns componentes e sensores) aproximadamente R$ 150,00. Podem ter certeza, vale o investimento!
Para conhecer melhor as potencialidades e aplicações Arduino, clique aqui.
Física com Arduino
A flexibilidade de comunicação e a variedade de shields e sensores disponíveis torna o Arduino uma plataforma muito poderosa para construção de equipamentos de laboratório de ensino e/ou pesquisa científica. Segue abaixo uma lista de tipos de componentes disponíveis e algumas ideias de aplicações:
Componente
Ideias de aplicações
Sensores ópticos
Detectar de passagem de um objeto; medir velocidade; detectar mudanças na iluminação, detecção de cores
Sensores de temperatura
Medir temperatura ambiente/atmosférica, temperatura da água em diferentes estados físicos, medir temperatura dos objetos, medir condutividade térmica em metais
Sensor piezoelétrico
Detectar sons, vibrações ou choques mecânicos, emissão de ondas sonoras
Sensor ultrassônico
Medir de distâncias
Sensor de gases
Medidas de poluição ambiental (CO, CO2)
Sensor de flexão
Medidas de força
Acelerômetro
Aceleração, orientação espacial e mais um monte de dados de dinâmicos do movimento dos corpos
Com essa variedade de sensores, podemos facilmente construir experimentos simples para demonstrar conceitos físicos como:
Velocidade média e velocidade instantânea,
Aceleração média e aceleração instantânea,
A aceleração da gravidade,
As leis de Newton,
Conservação do momento linear,
Transferência de calor entre corpos com diferente temperaturas,
A natureza periódica das ondas mecânicas,
Funcionamento de motores elétricos,
Conversão da energia solar em energia elétrica,
E muito, muito mais.
Conclusões
A lista de sensores e componentes disponíveis é grande demais para ser descrita, e todo dia novo sensores são lançados no mercado. As aplicações possíveis são limitadas APENAS por nossa criatividade.
É necessário dizer também que o Arduino não é um microprocessador em particular, mas sim uma plataforma de desenvolvimento. Há uma grande variedade de modelos, de vários tamanhos, com maior capacidade de processamento, mais entradas lógicas, e até mesmo com comunicação wifi já embutida. O tipo e o tamanho de placa depende muito do tipo de aplicação a ser desenvolvida. O custo também varia, mas a simplicidade e flexibilidade de desenvolvimento independe do modelo de placa.
Imagino que este post apenas introdutório possa ser um pouco frustrante já que descreve apenas o que pode ser feito, e não como as coisas são feitas. Vamos seguir adiante com calma. O Arduino tem sim uma curva de aprendizagem rápida, mas também possui alguns passos iniciais que devem ser dados com cuidado, especialmente para os iniciantes.
Nos próximos posts, vamos explorar exemplos práticos de grandezas físicas que podemos medir com Arduino.