Motivado pelo post da Física do loop, no qual alguns dos carrinhos não foram capazes de completar o loop quando soltos da altura mínima, resolvi comparar o coeficiente de atrito de vários carrinhos Hotwheels repetindo o experimento do post anterior sobre a distância de frenagem.
De forma muito muito resumida, considere um veículo se movendo em uma estradahorizontal com velocidade $v$, e que aciona o freio bruscamente. Este carro irá percorrer uma distância $\Delta x$ antes de parar. Como já sabemos, $F_{at} = \mu N$ é valido para o movimento horizontal, e com a ajuda do teorema do trabalho e energia cinética, é possível determinar coeficiente de atrito. As fórmulas usadas estão mais a frente neste post.
O experimento é muito simples, e pode ser visto no vídeo abaixo. O carrinho é lançado por um lançador de elástico com três níveis de força. Os parâmetros medidos no experimento são apenas dois: (i) a velocidade $v$ do carro é medida pelo sensor de velocidade, e a a distância de parada $\Delta x$ medida em relação à posição do sensor de velocidade.
Vídeo 1: Experimentar para determinar o coeficiente de atrito de carrinhos Hotwheels.
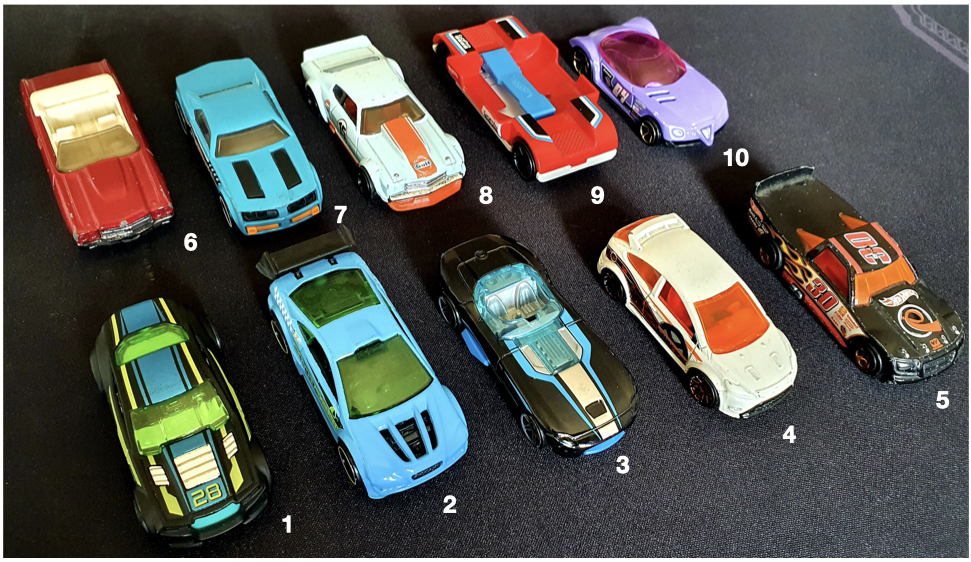
Nós vamos medir o coeficiente de atrito de 10 carrinhos diferentes, mostrados na figura abaixo. Apenas um lançamento foi realizado para cada nível de força do lançador. Para melhorar a precisão dos resultados, seria necessário realizar a média de vários lançamentos (3 a 5 para cada nível de força já seria o suficiente).
Figura 1: Qual o coeficiente de atrito destes 10 carrinhos? Cada carrinho é identificado por um número.
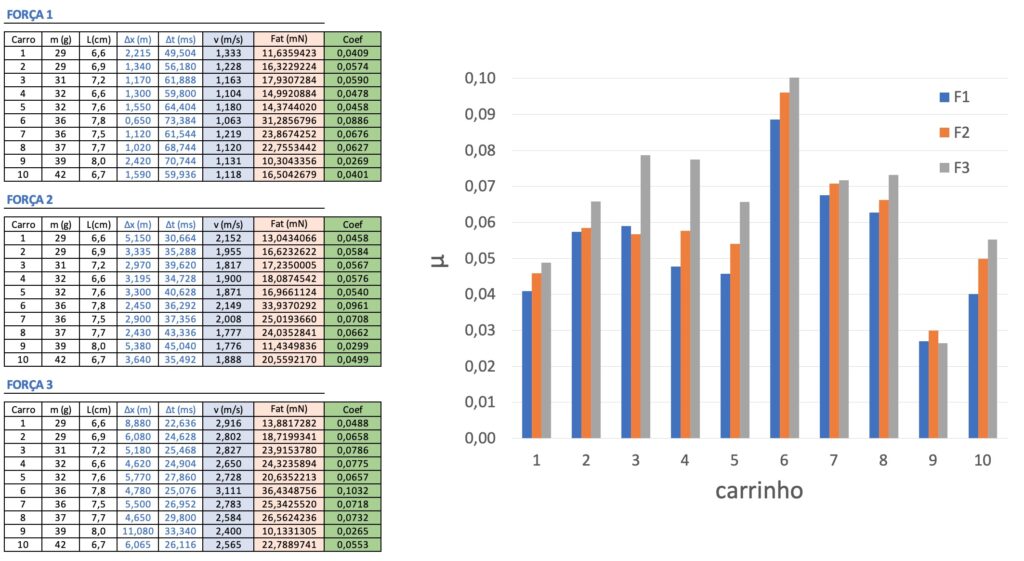
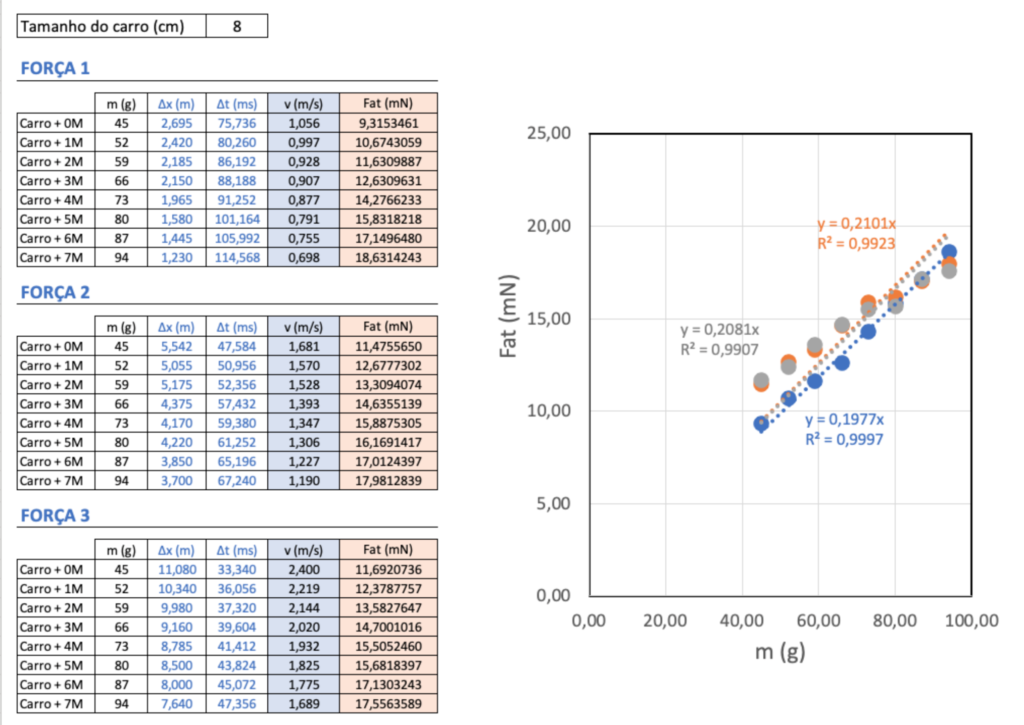
Os dados medidos estão nas tabelas abaixo agrupados por nível de força. As duas primeiras colunas são a massa e o tamanho do carrinho. Em seguida, a distância $\Delta x$ percorrida em cada lançamento, o tempo $\Delta t$ e a velocidade $v$ de passagem pelo sensor, a força de atrito e o coeficiente de atrito com as expressões abaixo:
$$F_{at} = \frac{m v^2}{2 \Delta x},$$
$$\mu = \frac{v^2}{2 g \Delta x}$$,
onde assumimos $g = 9,81~m/s^2$.
Figura 2: (esquerda) Dados dos carros e das medidas feitas em cada lançamento, agrupados por nível de força. (direita) Histograma dos coeficientes de atrito medidos cada cada carro em cada nível de força.
O melhor modo de analisar os resultados é utilizando um tipo de gráfico chamado de histograma. No eixo x, estão as categorias (no nosso caso, cada carro), e o eixo y estão os dados medidos do coeficiente de atrito. Cada cor indica um nível de força.
O primeiro detalhe que chama atenção é que, na maioria dos casos, o coeficiente de atrito depende da força de lançamento de modo que quanto maior a força maior o valor de $\mu$. Mas note também que, na maioria dos casos, os valores de $\mu$ não aumentam muito em relação à força. Por exemplo, para o carro 1, $\mu$ varia de 0,0409 para 0,0488 entre F1 e F3. Note também que $\Delta x$ cresce de 2,215 m para 8,880 m. Ou seja, o carrinho viaja uma distância quase 4 vezes maior. Devido a distância maior, o carrinho também passa por muito mais junções e pista e está sujeito a bater nas laterais da pista quando lançado com F3 em comparação com F1. E estas junções e choques com as bordas certamente afetam a medida do coeficiente de atrito. De qualquer forma, considero as variações pequenas, e estou convencido de que o coeficiente de atrito do carrinho 1 é aproximadamente a média de F1 a F3. No caso do carrinho 1, algo em torno de 0,045.
Uma visão geral mostra que os coeficientes de atrito varia muito entre os modelos. De certa forma, isto explica porque nem todos os carrinhos conseguiram completar o loop quando soltos da mesma altura no post sobre a Física do loop. Se você já brincou ou observou crianças brincando com os carrinhos, certamente sabe que parte da diversão é descobrir quais carrinhos irão completar uma pista construída (veja este vídeo para um exemplo que as crianças adoram).
Com este experimento, tive algumas surpresas interessantes. Sempre usei o carrinho 7 em vários experimentos aqui no blog por achar que ele era mais veloz que o carrinho 1, mas me enganei redondamente. Mas minha maior surpresa foi descobrir que o carrinho 9, feito para levar uma câmera Go Pro Sessions (nem o carrinho e nem a câmera são mais fabricados), é o mais eficiente de todos. Seu coeficiente de atrito é de cerca de 0,025 quando o segundo melhor carrinho (o carro 1) tem praticamente O DOBRO do coeficiente de atrito. Imagino que isto seja feito de propósito, pois o carrinho precisa levar a câmera nas costas para executar percursos e fazer vídeos irados como este aqui.
Para concluir, lembro a vocês que atrito é um assunto que rende bastante material, e ainda estou devendo a conclusão da sequência de posts sobre atrito com um experimento provando que $F_{at}=\mu N$ em pistas inclinadas, e consequentemente, em qualquer situação.
A força de atrito é tratada superficialmente nos livros e problemas de Física, e é praticamente inexistente nas aulas de laboratório. Mas, a menos que você esteja para vácuo do espaço, é praticamente impossível se livrar das forças de atrito.
Na minha época de estudante, a força de atrito me intrigava por uma simples razão. Por que a força de atrito é matematicamente definida como $F_{at} = \mu N$ ($\mu$ é o coeficiente de atrito, e $N$ é a força normal), se ela aponta na direção oposta ao movimento, mas a força $N$ é perpendicular ao movimento? Esta é a pergunta que motivou este post.
O objetivo deste post objetivo é desenvolver um experimento muito simples para estudar a força de atrito e distância de frenagem com Hotwheels, e provar que $F_{at} = \mu N$. Vamos também aprender a determinar o coeficiente de atrito dos carrinhos.
Um pouco de teoria
Imagine um veículo se movendo em uma estrada horizontal com velocidade $v$, e que aciona o freio bruscamente ao ver um obstáculo a uma certa distância a frente na estrada. Qual distância o carro vai percorrer até parar?
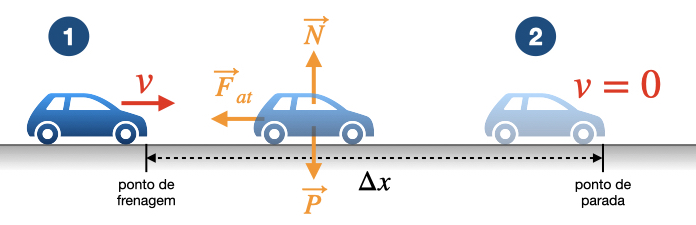
A Figura 1 mostra o diagrama deste problema. No ponto 1, o veículo está com velocidade $v$ e aciona o freio. Sem entrar nos detalhes mais complexos dos mecanismos de freio, durante o período de frenagem o carro está sujeito apenas às forças peso $\vec{P}$, a força normal $\vec{N}$ e a força de atrito $\vec{F}_{at}$.
As forças $\vec{P}$ e $\vec{N}$ atuam na direção vertical e se anulam pois, além de apontarem em direções opostas, não há nenhum movimento nesta direção. Portanto, a força resultante que atua no carro é apenas a força de atrito $\vec{F}_R = \vec{P} + \vec{N} + \vec{F}_{at} = \vec{F}_{at}$.
Figura 1: Diagrama do problema da distância de parada durante um freio.
O teorema trabalho e energia cinética noz diz que o trabalho da força resultante $W_R$ entre os pontos 1 e 2 é igual à variação da energia cinética entre estes pontos:
$$W_R = E_{C,2} – E_{C,1}.$$
Para simplificar a matemática, assumimos que a força de atrito é constante durante toda a distância de frenagem. Desta forma, o trabalho da força resultante $\vec{F}_R$ é calculado como
onde $\Delta \vec{x}$ é o vetor deslocamento (e que aponta na direção do movimento). Esta equação possui uma operação vetorial chamada de produto escalar, mas não se assustem. O significado é mais simples do que parece.
O produto escalar entre dois vetores $\vec{A}$ e $\vec{B}$ é dado por $\vec{A}\cdot\vec{B} = |\vec{A}||\vec{B}|\cos \theta$, onde $|\vec{A}|$ é o módulo do vetor $\vec{A}$, e $\theta$ \e o ângulo entre $\vec{A}$ e $\vec{B}$. Como $\Delta \vec{x}$ e $\vec{F}_{at}$ apontam em direções opostas, o ângulo entre estes vetores é de $180^o$, cujo cosseno é igual a $-1$. Desta forma, o trabalho da força de atrito é negativo:
$$W_{at} = – F_{at} \Delta x$$
O sinal negativo significa que o a força de atrito atua na direção contrária ao movimento. Se esta força atuasse na mesma direção do movimento, o trabalho teria sinal positivo.
Mas no nosso problema específico, a variação de energia cinética também é negativa $E_{C,2}-E_{C,1} = 0 – m v^2/2$. Combinando-se estes dois resultados, encontramos que o módulo da força de atrito durante a frenagem é dado por:
$$F_{at} = \frac{m v^2}{2 \Delta x}.$$
Nós aprendemos na escola que $F_{at} = \mu N$, onde $\mu$ é o coeficiente de atrito. Como nosso problema ocorre inteiramente na horizontal, temos que $N=P = m g$ ($g$ é a aceleração da gravidade). Daí, temos que:
$$F_{at} = \mu m g$$.
Observando cuidadosamente as duas equações acima, é possível propor uma forma simples de provar que a força de atrito é, de fato, proporcional à força normal (ao menos no problema do movimento completamente horizontal !).
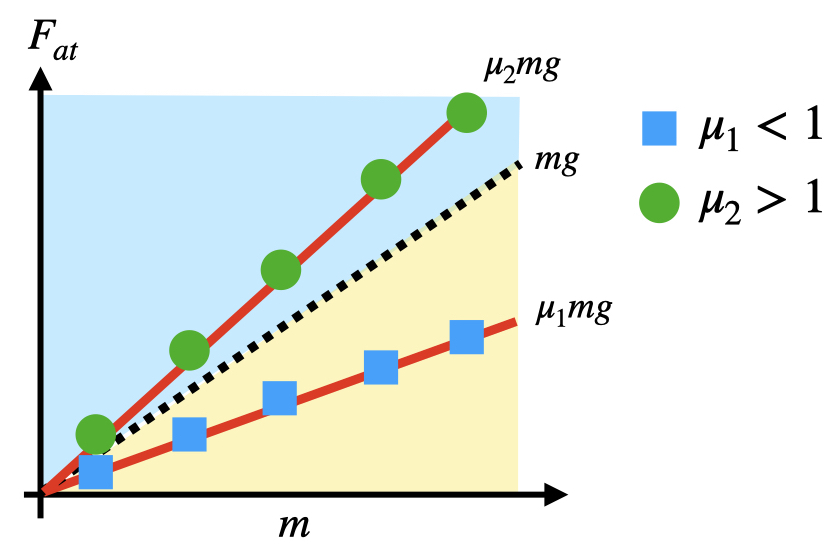
Se usarmos um carrinho que pode carregar pequenos pesos (usei o mesmo do post sobre a 2a. lei de Newton), e assim variar sua massa, podemos realizar o experimento de distância de parada para massas diferentes e plotar o gráfico $F_{at} \times m$. Devemos então obter os resultados experimentais recaindo sobre uma linha reta como mostrado na Figura 2.
Figura 2: Gráfico esperado do comportamento da força de atrito em função da massa o problema da distância de parada do movimento horizontal.
Na Figura 2, a linha tracejada representa a força peso $P$. Se os dados de de $F_{at} \times m$ recaírem sobre uma linha reta, temos que $F_{at} \propto N$ pois $P = N$ no movimento horizontal. Neste caso, o coeficiente da reta dever ser $\mu g$ pois $F_{at} = \mu m g$. Além disso, se os dados experimentais recaírem abaixo da linha da força $P$, o coeficiente de atrito do carrinho é menor que 1. Se os dados recaírem sobre uma linha acima da linha de $P$, é porque o coeficiente de atrito do carrinho é maior que 1. Chamo aqui a atenção para um fato muito importante: o coeficiente de atrito é uma grandeza adimensional !!!
O Experimento
De acordo com nosso modelo teórico descrito, precisamos lançar o carrinho com uma velocidade $v$, e medir a distância $\Delta x$ entre o ponto que a velocidade foi medida, e o ponto em que o carrinho parou. Estes dois valores são então substituídos nas equações acima para determinar a força de atrito. O setup experimental usado é mostrado na Figura 3.
Figura 3: Setup experimental.
Utilizei um único sensor de velocidade posicionado a uma pequena distância do ponto de lançamento do carrinho. Após o lançamento, a velocidade do carrinho é medida pelo sensor, e ele então percorre uma distância $\Delta x$ até parar. Utilizei o lançador e carrinho que pode levar várias moedas de 1 R$ do post anterior como forma de ter controle sobre a massa de um único carrinho, afim de evitar variações de coeficientes de atrito entre carrinhos diferentes. Este lançador possui 3 níveis de força e é capaz de aplicar forças resultantes da ordem de 0,8 mN, 1,6 mN e 2,8 mN, respectivamente. É importante lembrar que $\Delta x$ precisa ser medido entre o sensor e a traseira do carrinho.
Para minha surpresa, o carrinho com 7 moedas (cerca de 95 gramas) lançado no nível 2 de força percorre cerca 3,7 m antes parar. Isso mostra como o coeficiente de atrito dos carrinhos Hotwheels é baixo! Para o carrinho mais leve (cerca de 45 g), precisei de 11m de pista. Impressionante !!! Veja abaixo um exemplo de lançamento.
Vídeo: Lançamento do carrinho com 94g com o lançador no nível intermediário de força. A distância de parada foi de aproximadamente 3,7m. A velocidade do carrinho pelo sensor for de 1,19 m/s
Para termos ideia do coeficiente de atrito, podemos usar como exemplo os dados de lançamento do vídeo acima. O carrinho com 94g passou pelo sensor com 1,19 m/s, e percorreu 3,7 m antes de parar. Se o modelo teórico estiver correto, o coeficiente de atrito é dado por $\mu = v^2/(2 g \Delta x) \approx 0,019$. De fato, é um valor muito pequeno. Mas lembre-se que a estimativa acima ainda não prova que $F_{at} \propto N$!
Dados experimentais
A Figura 4 mostra os dados medidos de força de atrito em função da massa do carrinho medida individualmente para cada nível de força do lançador. A massa do carrinho varia entre 45 g (sem nenhuma moeda) e 94 g (levando 7 moedas), em incrementos de 7 g (equivalente ao peso de uma moeda de 1 R$). As forças de atrito variaram entre 9 mN e 20 mN, confirmando que o atrito sobre os carrinhos é muito pequeno. Um detalhe importante, dada a grande quantidade de dados, é que fiz apenas um lançamento para cada combinação de massa e nível de força para simplificar a análise.
Figura 4: Dados experimentais
As medidas mostram que $F_{at}$ cresce linearmente em relação a massa, confirmando que $F_{at} \propto N$ no movimento horizontal. Além disso, os coeficientes lineares obtidos para cada nível de força do lançador são bastante parecidos: 0.1977 (nível 1), 0,2101 (nível 2) e 0,2081 (nível 3). Lembrando-se que, de acordo com a teoria $F_{at} = \mu m g$, o coeficiente linear da reta que descreve $F_{at} \times m$ é dados por $\mu g$. Precisamos ainda dividir os coeficientes das retas por $g = 9,81 m/s^2$ para obter os valores de $mu$.
Os valores obtidos de $\mu$ são: 0,020 (nível 1), 0,021 (nivel 2) e 0,021 (nível 3). Ou seja, os coeficientes de atrito obtidos para cada nível de força são idênticos. Mas isso é natural, já que usamos o mesmo carrinho, e o atrito deve ser o mesmo, independente do nível de força do lançamento.
Há uma pequena discrepância entre os dados do lançamento do nível 1, em relação aos níveis 2 e 3, quando o carrinho está mais leve, mas esta diferença é muito pequena. Uma razão possível para esta discrepância é que o carrinho mais leve lançado nos níveis de força 2 e 3 percorre muitos metros a mais pista comparado com o carrinho mais pesado e/ou lançado no nível 1. Quanto maior a força do lançamento, maior a distância percorrida pelo carrinho, e maiores são as chances do carrinho tocar nas laterais da pista, aumentando assim o coeficiente de atrito efetivo. Um outro detalhe que certamente faz diferença é que quanto maior o $\Delta x$, maior é o número de junções de pista que o carrinho vai atravessar. E estas junções não são perfeitamente alinhadas. Isto também ajuda a desacelerar o carrinho um pouco mais rápido. Veja no vídeo 2 o carrinho sofrendo pequenas variações de trajetória ao passar pelas junções e ao bater nas laterais da pista.
Nos meus testes, percebi variações de até 50 cm na distância de frenagem para lançamentos realizados com a mesma massa no nível 3 de força. Fazer a média de vários lançamentos para cada combinação de força de lançamento e massa, deve eliminar estas discrepâncias. Fixar a pista no chão com fita adesiva também ajuda a prevenir vibrações que podem aumentar a chance contato do carro com as bordas da pista.
Vídeo 2: Pequenas variações de trajetória devido às junções e bordas laterais da pista.
Conclusões
O experimento descrito neste post nos permitiu demonstrar que $F_{at} = \mu N$ no movimento horizontal. Para isso, partimos apenas de um único principio fundamental: o teorema trabalho – energia cinética. Além disso, assumimos que a força de atrito era constante durante toda a distância de frenagem, e não levamos em conta o movimento de rotação dos pneus dos carrinhos, mas nada disso invalida qualitativa e quantitativamente os resultados obtidos aqui.
Para melhorar a precisão dos experimentos, convido os leitores a reproduzir o experimento realizando vários lançamentos para cada massa e nível de força, e construir os gráficos com os valores médios.
Um outro detalhe importante: para facilitar a coleta dos dados, usei um pequena tela OLED para projetar os valores dos tempos de passagem sem precisar monitorar as medidas pelo computador. Desta forma, o sensor de velocidade torna-se completamente independente do computador, e funciona como uma unidade portátil de realização de experimentos. Decidi não mostrar como se faz isto neste post, pois ele já está longo demais, mas prometo escrever um post sobre como fazer isso.
Finalmente, e não menos importante, o nosso experimento apenas prova que $F_{at} = \mu N$ é valida no movimento horizontal. A prova desta equação para movimento em pistas inclinadas, e portanto, em qualquer situação será assunto para o próximo experimento.
O nosso sensor de passagem para medir velocidade continua rendendo várias experiências interessantes e divertidas. No posto de hoje vamos falar sobre conservação de energia mecânica utilizando novamente uma pista de carrinhos Hotwheels e um sensor de velocidade.
Tipos de energia mecânica
Energia mecânica é todo tipo de energia associada ao movimento e/ou posição dos corpos. Na escola a gente aprende que há dois tipos de energia mecânica:
Energia cinética: um tipo de energia que está associada ao movimento dos corpos. Se um corpo de massa $m$ se move com velocidade $v$, este corpor possui uma energia cinética $E_C$ dada por:
$$E_C = \frac{m v^2}{2}$$
Energia potencial: um tipo de energia que está associado a posição de um objeto em relação a algum tipo de campo de força que interaja com o objeto. Na escola, a gente aprende que há 3 tipos de energia potencial: energia potencial gravitacional, energia potencial elástica, e energia potencial elétrica. Em outras oportunidades iremos discutir mais especificamente as diferentes formas de energia potencial, mas neste post iremos focar apenas na energia potencial gravitacional. Sabemos que qualquer objeto ou ser vivo em nosso planeta está sujeito ao campo gravitacional da Terra. Se elevarmos e soltarmos um objeto de massa $m$ a uma altura $H$ do solo, sabe-se que este objeto vai cair. E quanto mais alta for a altura $H$, maior vai ser a velocidade com que o objeto atinge o solo. Antes de o objeto adquirir energia cinética devido ao movimento de queda, o objeto ganhou energia potencial gravitacional dada por:
$$U_g = m g H$$
Conservação da energia mecânica
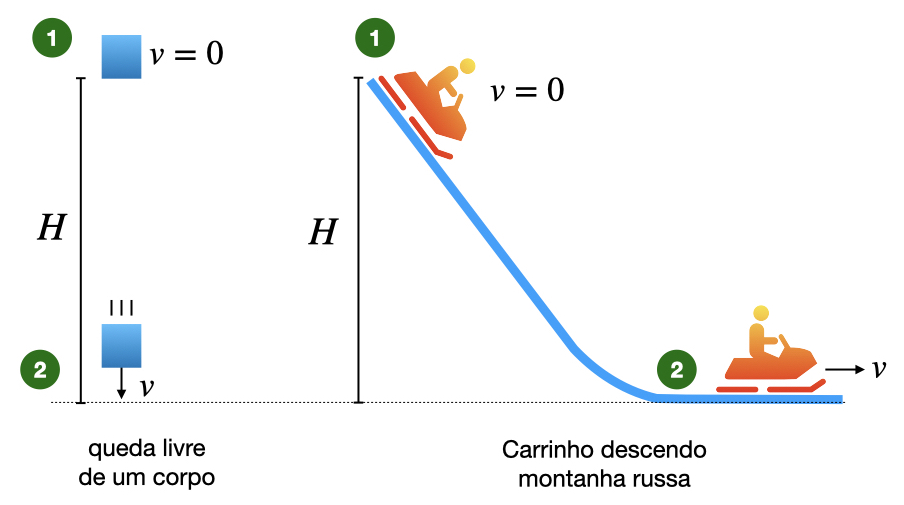
Um princípios mais importantes que regem tudo o que existe no universo é o da conservação da energia, seja ela mecânica ou não-mecânica. Quando não há forças que dissipem energia, toda a energia mecânica é conservada. Vejamos os exemplos dados na Figura 1.
Figura 1: (esq.) Corpo em queda livre. (dir.) Carrinho descendo uma montanha russa.
A Figura 1 mostra dois casos: a queda livre a esquerda, e de um carrinho descendo uma montanha russa. Nos dois casos, o corpo está parado e a uma altura $H$ em relação ao solo. A energia mecânica total do corpo no ponto 1 é:
$$E_{M,1} = E_{C,1} + U_{g,1} = 0 + m g H = m g H.$$
Como o corpo está parado no ponto 1, sua velocidade é nula ($v_1 = 0$), portanto, sua energia cinética também é zero ($E_{C,1}=0$). No ponto 2, o objeto está a uma altura zero em relação ao solo, e se movendo com uma velocidade $v_2$ que desconhecemos. Portanto, sua energia mecânica total é dada por:
Se não houver nenhum tipo de força que dissipe energia mecânica (força de atrito com o ar e/ou com o trilho, por exemplo), a energia mecânica total do sistema será conservada, ou seja, será a mesma para os pontos 1 e 2 ($E_{M,1}=E_{M,2}$). Se soubermos a altura $H$ inicial, podemos tirar proveito da conservação da energia mecânica e determinar a velocidade no ponto 2:
$$m g H = \frac{m v_2^2}{2} ~~ \rightarrow ~~ v_2^2 = 2 g H$$
O mais surpreendente desse resultado é que ele independe da massa $m$ do objeto, e também do caminho total percorrido pelo objeto. Note que na queda livre, o corpo percorre apenas uma distância $H$, que é altura de onde o corpo cai. No caso da montanha russa, o carrinho percorre o comprimento $L$ entre os pontos 1 e 2 da pista, que é maior que a altura inicial $H$. Isto só acontece porque o campo gravitacional é dito conservativo (ou seja, conserva energia mecânica), e o que interessa de fato são apenas as posições inicial e final do objeto em relação a superfície da Terra, e não o caminho percorrido.
E se houver forças dissipativas?
Se, em qualquer uma das situações mostradas na Figura 1, houver forças que dissipem a energia mecânica do sistema como a força de resistência do ar e/ou força de atrito com o trilho da montanha russa, a energia mecânica total não será conservada. Neste caso, teremos $E_{M,1} \neq E_{M,2}$. Mas é interessante saber o que ocorre com a diferença de energia mecânica entre os pontos 1 e 2:
A equação acima mostra que a variação de energia mecânica é simplesmente a soma das variações de todos os tipos de energia mecânica. No nosso caso específico da Figura 1, temos que
$$ \Delta E_M = \frac{m v_2^2}{2}~-~m g H.$$
Agora pensemos o seguinte, se houver qualquer tipo de atrito (com o ar e/ou trilho), a velocidade no ponto 2 será menor que na situação em que não há atrito. Portanto, obteremos $\Delta E_M < 0$ sempre !!!! Por outro lado, se $\Delta E_M >0$, é porque a velocidade do corpo no ponto 2 é maior do que quer deveria ser na situação em que não há atrito. E isso só pode ocorrer com uma única condição, houve alguma forma de energia dada ao corpo que serviu de propulsão para ganho de velocidade !!!
O experimento
Para estudar a conservação da energia mecânica, vamos utilizar o experimento mostrado na Figura 2, onde simulamos um trecho de queda de uma montanha russa. Vamos soltar dois carrinhos (de massas diferentes) de várias alturas diferentes, e medir sua velocidade na parte horizontal da pista.
Figura 2: Pista montada para o experimento de conservação da energia mecânica.
Se houver conservação de energia mecânica no nosso experimento, sabe-se que $v_1^2 = 2 g H$, então o gráfico $v_1^2$ vs $H$ construído com os dados de cada lançamento deve ser uma linha reta cujo coeficiente linear é igual a $2 g$, independente portanto da massa do carrinho. Se os dados experimentais ficarem abaixo desse gráfico, é porque há algum tipo de atrito no nosso experimento. Se ficarem acima, é porque há algum tipo de propulsão sendo dada aos carrinho, conforme mostrado na Figura 3.
Figura 3: Diagrama de $V^2$ vs $H$ mostrando as regiões de ganho, conservação e dissipação de energia.
Medidas
A Figura 4 mostra a tabela dos dados medidos para dois carrinhos diferentes (os mesmos do post anterior sobre a física do lançamento oblíquo). Ao todo foram realizados 10 lançamentos variando entre uma altura mínima de 25,5 cm e uma altura máxima de 57,5 cm.
Figura 4: Medidas de velocidade em função da altura de dois carrinhos Hotwheels diferentes. Os dados medidos estão abaixo da linha de conservação de energia que obedece $V^2 = 2 g H$ ($g = 9,81~m/s^2$), evidenciando uma pequena dissipação de energia. O arquivo em Excel pode ser baixado aqui.
É interessante notar que os dados dos dois carrinhos são idênticos, apesar das massas e tamanhos diferentes, e apresentando os valores de $v^2$ ligeiramente abaixo da linha teórica de conservação de energia. Para o lançamento de $H$ = 57,5 cm, a perda de energia é de menos de 1%, já para $H$ = 25,5 cm, a perda de energia é de cerca de 13%. No nosso sistema há três mecanismos principais de dissipação de energia: atrito nos pneus dos carrinhos, atrito com a pista, e a resistência do ar. Em princípio, é basta difícil separar a contribuição de cada um destes efeitos sem a montagem de experimentos mais sofisticados.
É importante também mencionar que há outra contribuição de energia mecânica que não foi considerada no problema: a energia cinética associada a rotação dos pneus. Embora este efeito seja bem complicado de explicar sem um experimento mais detalhado, acredito que esta contribuição é muito pequena devido ao pequeno diâmetro dos pneus, e tem pouco impacto nos resultados.
Apesar do pequeno efeito de dissipação de energia mecânica, concluo que, em uma primeira aproximação, podemos considerar que a energia mecânica foi conservada neste experimento.
Assista aqui demonstração deste experimento em vídeo:
Observação sobre a medida da velocidade
Neste experimento, a velocidade foi medida usando o sensor de passagem descrito aqui, mas com uma pequena modificação. Como foram feitas muitas medidas em alturas muito próximas umas das outras, foi necessário mudar o código do Arduino para que ele medisse os tempos de passagem com precisão de microssegundos. Utilizamos o mesmo código descrito aqui, mas trocando a chamada da função millis() pela função micros(). Segue abaixo o código utilizado para medir tempos de passagem com precisão de microssegundos.
// Definição das entradas
// define o pino digital 3 como entrada do fototransistor
const int FOTOpin = 3;
bool ligado = false;
long dt;
void setup() {
// coloque aqui o código de inicialização que será executada apenas uma vez.
// configuração do pino 3 como entrada
pinMode(FOTOpin, INPUT);
// inicializa a saída serial do Arduino
Serial.begin(9600);
}
void loop() {
// put your main code here, to run repeatedly:
// leitura do fotodiodo
int v1 = digitalRead(FOTOpin);
// detecta se um objeto chegou no sensor
if ((v1 == HIGH) & (ligado == false)){
ligado = true;
dt = micros();
}
// detecta se um objeto saiu do sensor
if ((v1 == LOW) & (ligado == true)){
ligado = false;
dt = micros() - dt;
Serial.print("Tempo de passagem (micro seg.) = ");
Serial.println(dt);
}
}
No post anterior, eu descrevi minhas motivações para criar este blog. E uma das mais importantes foi ter sentido a necessidade de incorporar elementos da cultura maker em minhas aulas de Física. E assim, tentar provocar os estudantes a realizarem/desenvolverem seus próprios experimentos científicos.
Ciências e experimentos
As ciências naturais (Física, Astronomia, Geologia, Biologia) estudam as leis que governam o mundo natural através de métodos científicos, cujos pilares são dados quantitativos. Neste aspecto, a Matemática não é um ciência natural pois sua validade não é determinada por experimentos científicos, mas sim uma linguagem descritiva dos fenômenos naturais. Por exemplo, Newton inventou o Cálculo para descrever o movimento dos corpos. Para os interessados em se aprofundar um pouco mais nesta discussão, sugiro este capítulo do famoso livro The Feynman Lectures on Physics.
A importância dos experimentos científicos para obter dados quantitativos é melhor descrita pela célebre frase de Lord Kelvin (aquele da escala de temperatura Kelvin): “medir é saber”. Lord Kelvin acreditava só temos conhecimento daquilo que conseguimos medir e expressar esse conhecimento em números. Se não conseguirmos medir algo, pouco ou nada sabemos sobre ele.
Para construir experimentos científicos é necessário compreender o que são grandezas físicas e suas unidades. Algumas grandezas físicas são tão fundamentais que são descritas em termos de como são medidas: comprimento, tempo, massa e temperatura. Nem é preciso se esforçar muito para explicá-las pois são tão fundamentais que já estão incorporadas ao nosso senso comum. Outras grandezas físicas são determinadas, por exemplo, em função das grandezas fundamentais como é o caso da velocidade (distância percorrida por unidade de tempo), e aceleração (variação de velocidade por unidade de tempo). Há muitas outras grandezas, e uma discussão mais completa sobre grandezas físicas e suas unidades de medida foge um pouco do objetivo deste post.
Nos experimentos científicos, as grandezas físicas são medidas por sensores, e armazenadas para posterior análise de diferentes formas. No passado, as grandezas físicas eram medidas e anotadas em um caderno de laboratório. Em muitos laboratórios de ensino, esse ainda é o método dominante. Pelo lado pedagógico até que faz sentido fazer tudo manualmente. Nos coloca no mesmo lugar que os gigantes da ciência estavam 50, 100 ou 200 anos atrás. Por outro lado, estes avanços científicos evoluíram muito lentamente justamente porque os pesquisadores do passado ainda tinham de projetar os equipamento para realizar a medidas, e só depois podiam se concentrar no fenômeno natural que os deixou curiosos inicialmente.
Hoje temos muitas opções tecnológicas que certamente os pesquisadores do passado teriam usado para acelerar suas descobertas. E podemos fazer isso sem perder a essência do pensamento científico envolvido na construção de experimentos.
Atualmente, a base tecnológica mais simples para desenvolver experimentos para medir grandezas físicas com uma rápida e suave curva de aprendizado é o Arduino.
O que é o Arduino
Placa Arduino UNO
Arduíno é uma plataforma de microprocessadores muito utilizada em projetos eletrônicos devido a sua versatilidade e simplicidade. O Arduíno é amplamente utilizado tanto em projetos comerciais como em projetos educativos.
Microprocessador é outro nome para um tipo de computador altamente especializado que roda apenas um único programa chamado firmware. Um microprocessador não possui monitor, mouse e nem teclado, mas possui uma pequena memória interna que representa o seu disco rígido, e é onde o firmware fica armazenado. Por outro lado, o Arduino possui muitas entradas lógicas onde podemos acoplar circuitos externos, sensores, pequenas telas de LCD, pequenos botões de comando e outros acessórios. Estes acessórios para Arduíno são conhecidos como shields.
O Arduino também pode se comunicar com outros dispositivos e até mesmo com a internet, dependendo do tipo de shield acoplado a ele. E é justamente esta flexibilidade de comunicação que torna o Arduino uma das plataformas mais utilizadas nas aplicações do tipo Internet da Coisas (ou IoT – Internet of Things). Um outro grande atrativo é o baixo custo. No Mercado Livre, Um placa do tipo Arduino UNO custa aproximadamente R$ 50,00, e um kit para iniciantes (placa mais alguns componentes e sensores) aproximadamente R$ 150,00. Podem ter certeza, vale o investimento!
Para conhecer melhor as potencialidades e aplicações Arduino, clique aqui.
Física com Arduino
A flexibilidade de comunicação e a variedade de shields e sensores disponíveis torna o Arduino uma plataforma muito poderosa para construção de equipamentos de laboratório de ensino e/ou pesquisa científica. Segue abaixo uma lista de tipos de componentes disponíveis e algumas ideias de aplicações:
Componente
Ideias de aplicações
Sensores ópticos
Detectar de passagem de um objeto; medir velocidade; detectar mudanças na iluminação, detecção de cores
Sensores de temperatura
Medir temperatura ambiente/atmosférica, temperatura da água em diferentes estados físicos, medir temperatura dos objetos, medir condutividade térmica em metais
Sensor piezoelétrico
Detectar sons, vibrações ou choques mecânicos, emissão de ondas sonoras
Sensor ultrassônico
Medir de distâncias
Sensor de gases
Medidas de poluição ambiental (CO, CO2)
Sensor de flexão
Medidas de força
Acelerômetro
Aceleração, orientação espacial e mais um monte de dados de dinâmicos do movimento dos corpos
Com essa variedade de sensores, podemos facilmente construir experimentos simples para demonstrar conceitos físicos como:
Velocidade média e velocidade instantânea,
Aceleração média e aceleração instantânea,
A aceleração da gravidade,
As leis de Newton,
Conservação do momento linear,
Transferência de calor entre corpos com diferente temperaturas,
A natureza periódica das ondas mecânicas,
Funcionamento de motores elétricos,
Conversão da energia solar em energia elétrica,
E muito, muito mais.
Conclusões
A lista de sensores e componentes disponíveis é grande demais para ser descrita, e todo dia novo sensores são lançados no mercado. As aplicações possíveis são limitadas APENAS por nossa criatividade.
É necessário dizer também que o Arduino não é um microprocessador em particular, mas sim uma plataforma de desenvolvimento. Há uma grande variedade de modelos, de vários tamanhos, com maior capacidade de processamento, mais entradas lógicas, e até mesmo com comunicação wifi já embutida. O tipo e o tamanho de placa depende muito do tipo de aplicação a ser desenvolvida. O custo também varia, mas a simplicidade e flexibilidade de desenvolvimento independe do modelo de placa.
Imagino que este post apenas introdutório possa ser um pouco frustrante já que descreve apenas o que pode ser feito, e não como as coisas são feitas. Vamos seguir adiante com calma. O Arduino tem sim uma curva de aprendizagem rápida, mas também possui alguns passos iniciais que devem ser dados com cuidado, especialmente para os iniciantes.
Nos próximos posts, vamos explorar exemplos práticos de grandezas físicas que podemos medir com Arduino.